
Ротационные инкрементные датчики работают путем генерирования последовательности импульсов во время движения. Энкодер крепится к валу передачи. Когда поворот вала и диска меняется, диск отслеживает движение на выход относительного положения. Такие энкодеры как правило, выдают прямоугольные сигналы в двух каналах, которые смещены друг от друга на 90 °, — другими словами, по фазе на 90 °. Каждое приращение вращения шпоры выходного сигнала.

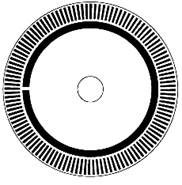
Это представление инкрементного датчика диска показывает, как отверстия (или метки) на колесе позволяют отслеживать его угловое положение.
Следует отметить, что поворотные инкрементные датчики начинают отсчет с нуля каждый раз, когда проходят полный цикл. Это справедливо независимо от того, где вал на самом деле в радиальном направлении. Таким образом, энкодеры всегда должны вернуться к точке отсчета. Это должно происходить как, когда машина начинает сначала и всякий раз, когда что-то прерывает электропитание. Здесь резервные батареи могут помочь устранить необходимость повторного самонаведения после остановов. Инкрементальные энкодеры, как правило, проще и дешевле, чем абсолютные датчики.

Этот диск является типичным для абсолютного датчика.
Абсолютные датчики имеют диск на валу мощности передачи и неподвижной головки, а диск выводит уникальный код для каждого положения вала. Абсолютные энкодеры делятся на два типа, однооборотные, многооборотные. На однооборотных абсолютных датчики можно проверить положение в пределах одного поворота вала. Это делает их полезными для коротких поездок ситуаций. В противоположности этому, множественный поворот абсолютные датчики лучше для более сложных или более позиционирующих ситуаций.
Инженеры в целом классифицируют абсолютные датчики по количеству их выходных бит, который коррелирует с количеством треков-и к диску максимального угла поворота регистров кодера. Больше после скачка.

Абсолютные датчики вращения имеют преимущество в энергонезависимой памяти. То есть, они не теряют след позиционирования даже при отключении электропитания. Так что даже если что то перемещает вал машины при отключении питания, абсолютный энкодер отслеживает изменения роторного положения. Обычно, электроника хранит эту информацию в виде двоичного кода, в идеале Грея двоичный код . Они полезны в ситуациях , когда безопасность является проблемой, так как они позиционируют когда это машина питание. Устойчивость к избирательному шума является еще одним преимуществом. Одно предостережение: абсолютные датчики вращения , как правило , дороже , чем инкрементальные датчики. Тем не менее, стоимость абсолютных датчиков постоянно сокращалась в течение последнего десятилетия, и это управляемое устойчивый рост их использование.
Все рекламируемые на данном сайте услуги
и компоненты не являются публичной офертой
В статье вы узнаете, что такое энкодер, какие он может измерять величины. Узнаете что такое инкрементальный и абсолютный энкодер. Познакомитесь с классификацией по принципу действия. А также узнаете на какие характеристики энкодеров нужно обращать внимание при выборе. Напоследок, небольшой список производителей.
Вы также можете посмотреть другие статьи. Например, «Датчики измерения давления» или «Относительная влажность воздуха».
Что такое энкодер
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер — это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер — это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается. Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал. Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров. Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала. Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
По принципу действия различают:
- энкодеры оптические
- магнитные
- магниторезисторные
Оптические
Рис. Схема оптического энкодера.
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
Рис. Схема магнитного энкодера.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
Рис. Схема магниторезистивного энкодера.
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
- Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
Производители
На российском рынке основными производителями энкодеров являются предприятия Екатеринбурга, а именно — ЗАО «Сенсор», НПП «Уралметаллургавтоматика», ЗАО «Уралчерметавтоматика». Кроме этого, выделяют НПК "ТЕКО" (г. Челябинск), СКБ ИС (г. Санкт-Петербург), Меандр (г. Санкт-Петербург), СТРАУС (г. Тольятти), Мега-К (г. Калуга) и др.
Если вам понравилась статья нажмите на одну из кнопок ниже
Что такое Энкодер.
Энкодер или датчик угла поворота – это электромеханическое устройство, предназначенное для преобразования углового положения вала или оси в электрические сигналы (рис 11.1). Существует два основных типа энкодеров — инкрементные и абсолютные.

Абсолютный энкодер
Диск абсолютного энкодера разбивается на некоторое количество секторов (чаще всего, но не всегда, это количество является степенью двойки). Сектора разбиваются на концентрические дорожки, каждая из которых представляет один бит кодированного номера сектора (рис. 11.2).
 |
| Рис. 11.2. Диск абсолютного энкодера. |
В данном примере абсолютный энкодер имеет 32 сектора. Соответственно, для их кодирования нужно log2(32) = 5 дорожек. Номера секторов обычно задаются кодом Грея. На каждую дорожку диска необходим отдельный датчик.
Обычное представление последовательности двоичных чисел не используется при построении абсолютных энкодеров из-за существенного недостатка.
Представим себе абсолютный энкодер, к примеру, 8-разрядный (угловой или линейный — не имеет значения). Он отслеживает перемещение по нарастанию координаты. Изменение его состояний приведено в таблице 11.1.
| Таблица 11.1: | |
| X | Binary |
| . | . |
На середине шкалы, при переходе от значения 127 к 128, на выходе энкодера меняются одновременно все разряды. В идеальном случае все разряды меняются одновременно. В реальности же двух совершенно одинаковых датчиков не бывает, все они хоть немного отличаются друг от друга чувствительностью, быстродействием и т.д.; к этому добавляется неидеальность юстировки при расположении восьми датчиков в линейку. Это приведет к тому, что в процессе перехода от значения 127 (01111111) к 128 (10000000) мы ожидаем увидеть любое 8-разрядное двоичное число.
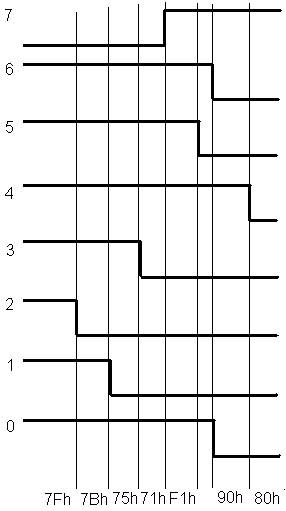
На рис 11.3 представлен пример такого изменения выхода при переключении состояния из 7Fh в 10h. Вместо перехода 7Fh → 10h можно наблюдать выходную последовательность: 7Fh → 7Bh → 75h → 71h → F1h → D1h → 90h →10h. Этот эффект может иметь крайне негативные последствия.
Предположим, что энкодер стоит в системе управления точным приводом. Контроллер, реализующий управление посредством петли обратной связи, сравнивает координату с датчика с желаемым положением инструмента и управляет сервомотором, перемещающим инструмент. Привод получает команду позиционирования в точку 128. Он успешно доезжает до 127 и на минимальной скорости, чтобы не проскочить по инерции, преодолевает последнюю ступеньку до 128.
В этот момент энкодер выдает какое-то случайное значение координаты; контроллер принимает его за истинную координату, вычисляет смещение относительно желаемой позиции и подает соответствующую команду сервомотору для сокращения этого смещения. Это "фантомное" смещение случайно и может быть любым в диапазоне от 0 до половины длины всей линейки (с учетом того, что мы уже находимся в середине; возьмем среднее значение в четверть линейки как наиболее вероятное).
Итак, не доехав до желаемого положения каких-то полшага, сервомотор делает мощный рывок и пытается утащить каретку куда-то в сторону на четверть линейки. По пути датчик получает правильные значения, вычисленное смещение резко уменьшается, и дальнейшее поведение привода полностью зависит от его динамики: тяжелая и медленная каретка просто не успеет разогнаться, легкая же и быстрая может начать осциллировать вокруг точки назначения.
Всех этих неприятностей можно легко избежать, если использовать для представления координаты код Грея. Основная его особенность состоит в том, что при увеличении или уменьшении величины на единицу код Грея для этой величины изменяется лишь в одном разряде. Как соотносится код Грея и двоичный код, показано в таблице 11.2.
| Таблица 11.2: | ||
| N | Двоичный код | Код Грея |
Какую бы строку в таблице мы ни выбрали, при переходе на одну строчку вверх или вниз в коде Грея меняется лишь один разряд; следовательно, даже при наличии переходных процессов в датчике разница между двумя отсчетами не превысит одной единицы, что является вполне допустимым в промежуточной зоне.
Инкрементальный энкодер
Как следует из самого названия, инкрементальный энкодер определяет не абсолютное положение диска в пределах полного оборота, а относительное смещение от предыдущего положения. Для этого достаточно диска с единственной дорожкой (рис. 11.4).
 |
| Рис 11.4 |
Часто добавляют вторую дорожку с единственным делением на полный оборот. Эта дорожка позволяет выставить диск в начальное положение, относительно которого впоследствии будут производиться отсчеты. Она также может оказаться полезной в процессе диагностики энкодера, позволяя проконтролировать количество импульсов, выдаваемое датчиком за один оборот диска.
Подсчитывая количество импульсов от датчика, можно определить угол поворота диска относительно предыдущего положения; однако невозможно определить направление вращения диска. Для определения направления используется второй датчик, смещенный относительно первого на четверть шага (половину ширины штриха или промежутка между ними). По разности фаз сигналов датчиков определяется направление вращения диска.
Сравнение абсолютного и инкрементального энкодеров
Обе разновидности углового энкодера имеют свои достоинства и недостатки.
Абсолютный энкодер можно опрашивать в любой момент, когда потребуется узнать положение диска, а не обрабатывать перемещение на каждый шаг. Это упрощает работу с ним (в частности, делает тривиальным определение направления вращения диска), а также снижает требования к контроллеру, обрабатывающему данные о координатах (если контроллер потеряет несколько импульсов от датчиков, информация о текущем положении диска все равно будет доступна).
К недостаткам абсолютного энкодера в первую очередь следует отнести сложность изготовления, связанную с наличием большого числа датчиков (по одному на каждую дорожку диска, то есть на каждый разряд кода угловой координаты диска). Также в случае высокой точности энкодера (и, как следствие, большого количества разрядов данных) для подключения энкодера к контроллеру потребуется большое число линий связи и такое же число битов ввода (в случае параллельной передачи данных) либо затраты на дополнительное оборудование сериализации (в случае последовательной передачи).
В случае инкрементального энкодера достоинства и недостатки меняются местами по сравнению с абсолютным. Достоинствами являются: простота (всего два датчика вне зависимости от разрешения), относительная легкость при кустарном изготовлении, малое количество линий связи с контроллером. Недостатки: высокие требования к быстродействию контроллера (в случае потери импульсов от датчиков в данных о координате будет накапливаться ошибка), более высокая сложность обработки данных (из-за необходимости определения направления вращения диска).
Простейшая процедура обработки сигналов инкрементального энкодера.
Прежде чем приступить к рассмотрению процедур обработки сигналов декодера, выясним, что представляют собой эти сигналы.
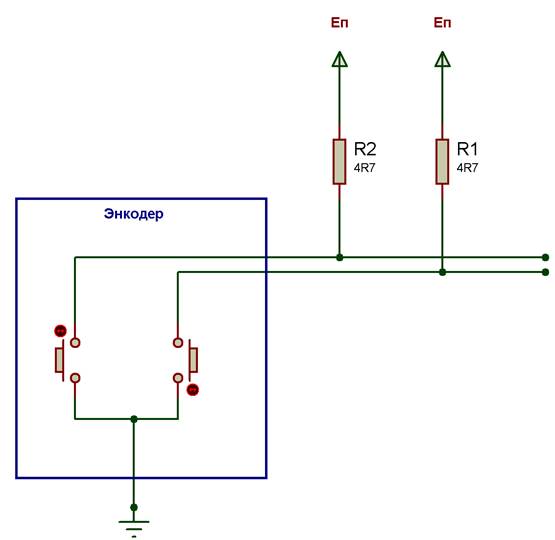
Как уже говорилось ранее, декодер имеет два датчика: A и B. Датчики сдвинуты друг относительно друга на половину ширины штриха (или четверть шага диска), поэтому сигналы получаются сдвинуты по фазе на p/2. Примем для определенности, что сигнал B отстает от сигнала A при повороте диска против часовой стрелки:
Из рис. 11.5 видно, что при движении диска против часовой стрелки (состояния 0-1-2-3-4. ) в момент перехода сигнала A из состояния 0 в 1 (передний фронт) сигнал B всегда находится в состоянии 0 (см. состояния 0, 4, 8). Если же диск движется по часовой стрелке (7-6-5-4-3. ), сигнал B всегда находится в состоянии 1 (состояния 6, 2).
 |
| Рис. 11.5. Форма сигналов датчиков A и B |
Отсюда вытекает простейшая процедура обработки сигналов декодера: по переднему фронту сигнала A проверить состояние сигнала B; если он равен 0, увеличить счетчик координаты на единицу, в противном случае уменьшить его на единицу.
Этот алгоритм вполне пригоден для применения в некритичных устройствах, когда погрешность определения координаты не приводит к фатальным последствиям: не так давно вытесненные оптическими роликовые мыши/трекболы, валкодеры магнитол и т. п. Однако он не годится для применений, в которых точность определения координаты является решающим фактором.
Причина несовершенства такой, казалось бы, простой и надежной процедуры кроется в том, что он требует сигналов идеальной формы. В реальных условиях датчики могут иметь «дребезг» при смене состояния сигнала (особенно это относится к датчикам с механическими контактами). В результате дребезга приращение координаты будет произведено несколько раз вместо одного, и значение координаты будет испорчено.
Но, даже если бы удалось избавиться от дребезга полностью, останется другая проблема. Предположим, что диск находится в положении между точками 3 и 4 на рис. 3 (назовем такую точку 3.5). При перемещении в точку 4.5 в точке 4 сигнал A переходит из 0 в 1, и согласно нашей процедуре координата диска увеличивается на единицу (поскольку сигнал B равен нулю на переднем фронте импульса A). Затем диск возвращается из 4.5 обратно в 3.5, но, поскольку при обратном движении диска в точке 4 сигнал A переходит из 1 в 0, наша процедура игнорирует это событие.
Итак, имеем: диск переместился на небольшой угол и вернулся в исходное положение, а координата увеличилась на единицу. Можно повторять такое перемещение произвольное число раз, и координата каждый раз будет увеличиваться. В итоге координата диска, измеренная посредством простейшей процедуры, не будет иметь ничего общего с истинным положением диска.
Проблема является достаточно актуальной, поскольку вероятность остановки диска на границе между светлой и темной зонами достаточно велика, а вибрации при работе промышленного оборудования в сочетании с возможным люфтом привода вполне могут привести к колебаниям диска, достаточным для смены состояния датчика. Это делает простейшую процедуру обработки сигналов по переднему фронту сигнала A непригодной для ответственных применений, где требуется максимальная точность измерения координаты диска.
Стоит отметить, что любой инкрементный энкодер имеет 2 типа состояний: устойчивое и не устойчивое. Устойчивые состояния энкодера расположены через один период сигнала А. Не устойчивые состояния – это все остальные. Из неустойчивых состояний энкодер легко переходит в устойчивое. Т.о. за точку отсчёта можно принимать только утойчивые состояния.
Дата добавления: 2017-01-16 ; просмотров: 5754 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
