
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
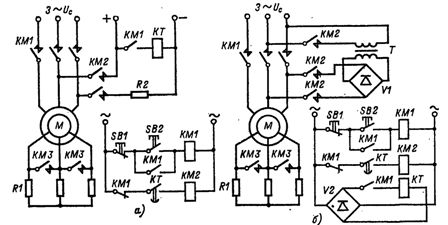
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
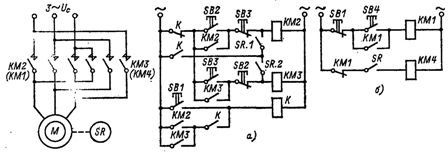
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
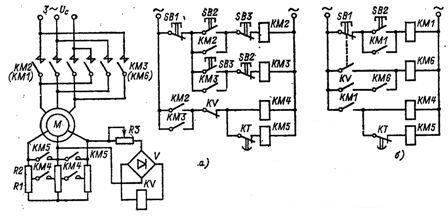
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
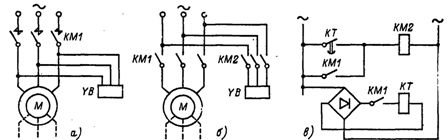
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
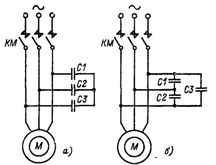
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Динамическое торможение АД (торможение постоянным током) осуществляется путем подключения к двум любым обмоткам статора источника постоянного тока. При этом с помощью группы контактов К1 асинхронный двигатель сначала отключают от питания трехфазным переменным током, и только после этого, замыкают группу контактов К2 и подают постоянный ток. Величину постоянного тока регулируют сопротивлением r т (рисунок 1).
Рисунок 1 — Схема динамического торможения асинхронного двигателя
Само динамическое торможение асинхронного двигателя сопровождается следующими процессами и изменениями:
При отключении переменного тока, вращающееся магнитное поле перестает существовать. Далее подключают источник постоянного тока, который создает постоянное магнитное поле. Ротор по инерции продолжает крутиться теперь уже в постоянном магнитном поле, в обмотке ротора наводится ЭДС, ее частота прямо пропорциональна скорости вращения вала. Появление тока в обмотке ротора вызвано наличием вышеупомянутой ЭДС. Ток создает магнитный поток, который неподвижнен относительно статора. Взаимодействие результирующего магнитного поля АД и тока ротора создает тормозной момент. При этом асинхронный двигатель становится генератором; преобразовует кинетическую энергию вращающегося вала в электрическую, которая на обмотке ротора рассеивается в виде тепловой энергии. При переходе в режим динамического торможения частота и угловая скорость равны: f =0 w =0. Кривая динамического торможения должна проходить через начало координат и торможение происходит до полной остановки (рисунок 2).
Эффективность динамического торможения зависит от параметров:
— Величина постоянного тока, который протекает по статорной обмотке двигателя (чем больше ток, тем больше тормозной эффект);
— Величина сопротивления, введенного в цепь ротора. Эффективность торможения повышается путем комбинирования динамического торможения и торможения с введением сопротивлений в обмотку ротора (рисунок 2):
Рисунок 2 – Механическая характеристика динамического торможения асинхронного двигателя
Чем больше сопротивление введено в цепь ротора, тем выше эффективность торможения, то есть на кривой а1 изображена самая быстрая остановка двигателя при наибольшем сопротивлении — R1>R2 >R3 .
— Схема соединения обмоток статора .
Величина магнитодвижущей силы ( F ) напрямую связана с понятием эффективность торможения, чем больше значение силы – тем эффективней происходит торможение,
На рисунках, которые изображены ниже, стрелками показаны направления протекания постоянного тока по обмоткам, IW – ампер витки (так как количество витков в обмотках одинаково, то зависит значение только от величины тока). Векторные диаграммы иллюстрируют направления магнитодвижущих сил ( F ), сложив по правилам суммирования векторы, мы получим результирующий вектор, который обозначен жирной стрелкой.
Обмотка статора может быть соединена:
а) Схема соединения обмотки статора в звезду:
б) Схема соединения статорной обмотки в треугольник:
в) Соединение обмотки статора в звезду с закороченными двумя фазами:
г) Подключение звезда с разорванным нулем:
д) Подключение треугольник с закороченными фазами:
Схемы соединения а) и б) имеют наибольшее распространение, потому что не требуют переключения при торможении самих обмоток.
Необходимо подметить, что напряжение ( U ) источника постоянного тока должно быть малой величиной, потому что сопротивление обмотки статора мало. Ток выбирается из условия необходимого начального тормозного момента, обычно выбирают
Преимущества режима динамического торможения:
— Относительная простота осуществления способа;
— Возможность торможения до полной остановки вала ротора;
— Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
Расчет величины тормозного сопротивления:
где R T — полное сопротивление цепи источника постоянного тока,
rф.ст — сопротивление фазы статора.
Вышеприведенные формулы являются частным случаем (для понимания отношений величин сопротивления), когда постоянный ток протекает только по двум обмоткам статора, если же ток будет протекать по трем обмоткам, то коэффициент (количество фаз) перед сопротивлением фазы статора нужно соответственно изменить.
Советую вам прочесть статью про торможение противовключением, в которой подробно расписан данный вид остановки двигателя.
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Рвсиублии (61) Дополнительное к авт. свид-ву (22) Заявлено 13.02.76 (21) 2321302/24-07 с присоединением заявки № (23) Приоритет (43) Опубликовано 30.06.78. Бюллетень № 24 (45) Дата опубликования описания 08.06.78 (51) Ч. Кл."- Н 02Р 3!24
Совета Министров СССР ло делам изобретений и открытий (53) УДК 621.316.7.719 (088.8) (72) Авторы изобретения
А. Г. Яуре, Е. М. Певзнер, С. П. Голев, В. И. Дмитриев, П. Е. Данилов и В. А. Барышников (71) Заявитель (54) УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
Изобретение относится к области автоматизированного электропривода и может быть использовано для привода крановых механизмов.
Известны устройства для динамического тормо>кения асинхронного электродвигателя с фазным ротором, содержащие в цепи ротора активное сопротивление и трехфазный выпрямитель, выход которого подключен к началам двух фазных обмоток статора параллельно внешнему источнику возбуждения (1).
Недостаток известных устройств состоит в возможности возникновения больших токов н моментов при замедлении двигателя, например при переходе с повышенной скорости на низкую «посадочную» в тормозном режиме, что может привести к черезмерным динамическим нагрузкам в механической части электропривода и металлоконструкциях крана, а также к выходу двигателя из строя.
Наиболее близким техническим решением к изобретению по технической сущности и решаемой задаче является устройство для динамического тормо>кения асинхронного электродвигателя с фазным ротором, содержащее выпрямитель, резистор и датчик тока в цепи ротора электродвигателя, выпрямитель и регулятор тока в цепи статора и контактор, соединяющий обмотки статора и ротора электродвигателя (2).
Недостаток такого устройства заключается в отсутствии стабилизации тормозного момента для двигателей, у которых не соблюда ются условия самовозбуждения.
5 Цель изобретения — поддержание постоян ства момента торможения для двигателей, у которых не обеспечивается самовозбуждение.
Это достигается гем, что устройство длг динамического торможения асинхронного
10 электродвигателя с фазным ротором, содержащее выпрямитель, резистор и датчик тока в цепи ротора, выпрямитель н регулятор тока в цепи статора н контактор, соединчющий обмотки статора н ротора электродвигателя, 15 снабжают релейным блоком управления, включенным между датчиком тока и регулятором тока.
На фнг. 1 представлена принципиальная схема асинхронного электропрнвода в режи20 ме динамического торможения со смешанным возбуждением прн подключении к обмоткам статора внешнего нерегулируемого однофазного выпрямителя, в цепь которого последовательно включен регулятор тока; на фнг. 2
25 изображены механические характеристики при переходе с повышенной скорости на пониженную в режиме динамического торможения с ограничением момента двигателя.
В представленном электроприводе исполь30 зовано устройство для динамического тормо613469
50 жения асинхронного двигателя 1 с фазным ротором, в цепь которого включен трехфазный выпрямитель 2. Выход трехфазного выпрямителя 2 через регулируемый резистор 3 подсоединен к двум обмоткам статора, параллельно которым подключен нерегулируемый однофазный выпрямитель 4. Сигнал от датчика 5 выпрямленного тока ротора поступает на релейный блок 6 управления, выход которого подается на управляющие электроды тиристоров импульсного регулятора 7 тока, включенного последовательно в цепь нерегулируемого однофазного выпрямителя 4.
Принцип действия устройства заключается в следующем.
Пусть первоначально двигатель работал на харатеристике А, близкой к естественной, с моментом сопротивления М, (точка А фиг.
2). При этом регулируемый резистор 3 полностью выведен, контакты 8 и 9 в цепи статора и ротора замкнуты. В режиме динамического торможения контакты 8 и 9 размыкаются, а контакты 10 и 11 замыкаются. От нерегулируемого однофазного выпрямителя 4 по обмоткам статора начинает протекать максимальный ток возбуждения 1„величина которого выбирается, исходя из обеспечения низкой посадочной скорости. Можно выбирать величину тока возбуждения из условия ограничения максимального момента, но в этом случае не будет обеспечена необходимая пониженная скорость, как это видно по характеристике С .
Имея запас кинетической энергии на валу, двигатель стремится перейти на характеристику С динамического торможения со смешанным возбуждением — с максимальным моментом М,„, „превышающим в общем случае максимальный момент М„„„., в двигательном режиме. Ток ротора повышается, увеличивается сигнал датчика 5 тока, и при достижении им величины, равной заданному напряжению срабатывания U„ релейного блока 6 управления, на импульсный регулятор 7 тока подается сигнал, запирающий основной тиристор. Ток возбуждения 1, быстро понижается, момент и ток ротора двигателя также уменьшаются, и при некотором значении выходного напряжения датчика 5 тока, обусловленном гистерезисом релейного блока
6 управления, на основной тиристор импульсного регулятора 7 тока поступает отпирающий импульс. Ток возбуждения 1„выпрямителя 4 снова начинает возрастать, соответственно увеличиваются ток ротора 1д и момент асинхронного двигателя 1 до следующего срабатывания импульсного регулятора тока и так далее.
Таким образом, в переходном процессе при замедлении электропривода происходит поддержание тока, а следовательно, и момента двигателя относительно некоторого среднего значения, определяемого величиной напряжения срабатывания U,ð релейного блока 6 управления. Асинхронный двигатель 1 тормозится под действисм среднего динамического момента М,„р — М, и в установившемся режиме работает в точке D на характеристике
С с низкой скоростью.
Устройство для динамического торможения асинхронного двигателя с фазным ротором позволяет эффективно ограничивать ток и соответственно момент при замедлении двигателя, у которого не выполняется условие самовозбуждения, путем регулирования тока возбуждения в функции поддержания постоянства выпрямленного тока ротора. Это устройство успешно может быть применено как для двигателей, у которых условие самовозбуждения не выполняется, так и для тех двигателей, у которых невыполнение условия самовозбуждения создается искусственно путем параллельного включения резистора к обмоткам статора.
Формул а изобретения
Устройство для динамического торможения асинхронного электродвигателя с фазным ротором, содержащее выпрямитель, резистор и датчик тока в цепи ротора электродвигателя, выпрямитель и регулятор тока в цепи статора и контактор, соединяющий обмотки статора и ротора электродвигателя, отличающ е е с я тем, что, с целью поддержания постоянства момента торможения для двигателей, у которых не обеспечивается самовозбуждение, устройство снабжено релейным блоком управления, включенным между датчиком тока и регулятором тока.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 230942, кл. Н 02Р 3/24, 1968.
2. Авторское свидетельство СССР № 253215, кл. Н 02Р 3/24, 1968.
