
Импульсные процессы
Источниками колебаний в форме импульсов чаще всего являются импульсные генераторы — автономные преобразователи энергии источника питания, в энергию разрывных колебаний требуемой формы. Другим способом получения импульсов является их формирование путем изменения параметров колебаний иной формы, например синусоидальной.
Для этого используют формирующие устройства — ограничители амплитуды, схемы дифференцирования и другие устройства, которые изменяют параметры колебания — амплитуду, период следования, форму и т.п.
Электрическим импульсом называют напряжение или ток, отличающиеся от нуля или постоянного значения только в течение короткого промежутка времени, который меньше или сравним с длительностью установления процессов в электрической системе, в которой они действуют. Импульсы могут быть как периодическими, так и одиночными (рис. 1)
Рис. 1. Импульсы различной формы
В случае следующих друг за другом импульсов (т.е. периодических) обычно предполагается, что интервал между ними существенно превышает длительность процессов установления. В противном случае этот сигнал называют несинусоидальным напряжением или током. Такое определение не отличается строгостью, ибо переходные процессы протекают, как известно, бесконечно долго. Однако оно позволяет отличать импульсы в общепринятом смысле от напряжения сложной формы.
Параметры электрического импульса
Импульсы и импульсные последовательности характеризуются рядом параметров (длительность импульса, длительность паузы, время фронта, период следования и др). Методика измерения этих параметров представлена на рис 2.
Рис. 2. Основные параметры импульсов
Um – амплитуда импульса. Это наибольшее отклонение напряжения от исходного, установившегося значения Uo;
tфр – длительность фронта импульса (или время фронта). Это временной интервал, в течение которого напряжение возрастает от 0,1Um до 0,9Um. Иными словами, время фронта измеряется не по максимальному и минимальному значению напряжений, а по уровням 0.1-0.9 от максимального значения.
tcп – длительность спада импульса (или время спада). Это временной интервал, в течение которого напряжение спадает от 0,9Um до 0,1Um. Его иногда еще называют временем среза импульса.
tи – длительность импульса. Это временной интервал между моментами на соседних интервалах tфр и tcп, для которых u = 0,5Um. Иными словами, длительность импульса измеряется на уровне половины амплитуды.
tп – длительность паузы. Она измеряется по уровню 0.5 аналогично длительности импульса. При этом соблюдается соотношение tп = T- tи.
Т – период следования импульсов. Это временной интервал между моментами на соседних интервалах tфр или tcп, для которых u = 0,5Um. Иными словами, период измеряется по уровню половины амплитуды между двумя соседними фронтами или спадами.
f – частота следования импульсов. Это величина, обратная периоду f =1 / T.
Q — скважность импульсов. Это величина, равная отношению периода к длительности импульсов: Q = Т/tи
Kз – коэффициент заполнения импульсов. Это величина, равная отношению длительности импульса к периоду: Kз = tи/T. Коэффициент заполнения и скважность импульсов – взаимообратные величины.
Дата добавления: 2016-02-27 ; просмотров: 3159 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Проектирование прибора измеряющего длительность импульса
В настоящее время микропроцессорная техника делает большие успехи в применении, в различных отраслях производства. Сейчас микропроцессоры стали применяться не только в бытовой технике и в автомобилях, но и даже в производстве управляя сложнейшими технологическими процессами.
Цель курсового проекта послужила создание измерительного прибора на базе микропроцессора AVR90S8515
Микропроцессоры американской фирмы ATMEL, в последние годы делают значительные успехи в освоении новых областей в сфере своего применения. Микропроцессорное ядро, используемое в микроконтроллерах AVR, похоже на большинство процессоров с RISC архитектурой, пожалуй, за исключением 8-разрядных регистров. Разработано двумя разработчиками из Норвегии, в городе Trondheim. Позже, в 1995 году, разработка была приобретена фирмой Atmel. До сих пор развитие ядра происходит в Норвегии, в то время как периферия и память разрабатываются в отделении Atmel в Калифорнии.
С помощью проектируемого прибора можно будет измерять длину импульсов в диапазоне от 10 мСек до 10 Сек измеренная величена будет отображаться на четырех разрядном светодиодном индикаторе
Необходимо спроектировать прибор для измерения длительности импульса.
| Мин. | Макс. | |
| Диапазон измерения: | 10 мС | 10с |
| Погрешность измерения | 1% | |
| Количество гальванически развязанных каналов Входное напряжение логической единицы Входное напряжение логического нуля | 1 уровень ТТЛШ уровень ТТЛШ | |
| Количество режимов измерения | 2 Из-ие высоко уровня длительности импульса Из-ие низкого уровня длительности импульса | |
| Возможность индикации измеренной длительности Количество режимов отображения измеренной длительности | Есть Светодиодные индикаторы –4 шт 2 отображение в секундах отображение в мили секундах | |
| Выходное напряжение источника питания | +5 В | |
2. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ. ОБОБЩЕННЫЙ АЛГОРИТМ РАБОТЫ
Структурная схема измерительного прибора приведена на рис.1
Структурная схема измерительного прибора

мСек – кнопка выбора отображения измеренной длительности импульса в мили Секундах.
Сек — кнопка выбора отображения измеренной длительности импульса в Секундах
Инверсия – кнопка выбора первого или второго режима измерения см ТЗ.
Св.Д1. – светодиод индицирующий включение второго режима измерения
Св.Д2. – светодиод индицирующий включение режима отображения измеренной длительности импульса в секундах.
Св.Д3. – светодиод индицирующий включение режима отображения измеренной длительности импульса в мили секундах.
AVR90S8515 – однокристальная микро-ЭВМ AVR90S8515
Дешифраторы производят дешифрацию двоично-десятичного кода, а индикаторы отображают результаты измерения.
При включении питания микро-ЭВМ производит выполнение подпрограммы инициализации (инициализация стека, настройка используемых портовВВОДА/ВЫВОДА, загружается в компаратор А таймер/счетчика число 80000, выбирается нужный режим работы таймер/счетчика 1 (бит CTC1 регистра управления таймером/счетчиком 1(TCCR1B), устанавливается в единицу, что означает сброс таймер/счетчика 1 при срабатывании компаратора А, также бит CS10,находящийся в этом же регистре, устанавливается в единицу, это означает, что в качестве источника синхронизации будет использоваться частота синхронизации кварцевого резонатора), происходит глобальное разрешение прерываний ). Далее происходит опрос состояния кнопки выбора режима измерения длительности импульса и в зависимости от ее состояния (0 – измерение низкого уровня длительности импульса, 1 — измерение высокого уровня длительности импульса ), происходи переход на соответствующую подпрограмму (IMPULS_POLOGITELNAY – подпрограмма измерения высокого уровня длительности импульса, IMPULS_OTRICHATELNAY — подпрограмма измерения низкого уровня длительности импульса ).
Алгоритм работы этих двух подпрограмм практический одинаковый, для примера рассмотрим работу подпрограммы IMPULS_POLOGITELNAY. При переходе на эту подпрограмму МП начинает опрос линии PA0 и в случае обнаружения на ней логической единицы запускает таймер/счетчик 1. При срабатывании компаратора А происходит сброс таймер/счетчика 1 (в компаратор А загружено число – 8000, при частоте синхронизации МП равной 8Мгц срабатывание компаратора произойдет ровно через 1мС±1% ), что говорит о прошествии 1мСек. Отчет мили секунд в соответствии с ТЗ начнется после прошедшей девятой мили секунды. Индикация измеряемой длительности импульса происходит каждые 50 мСек. Вмести с этим МП продолжает сканировать линию PA0 и после того как он обнаружит на ней состояние логического нуля, что говорит о конце измерения длительности импульса, произойдет остановка таймера/счетчика 1 и произведется переход на подпрограмму перевода двоичного шестнадцати разрядного числа в двоично-десятичное — bin16BCD5 (детальный алгоритм перевода двоичного шестнадцати разрядного числа в двоично-десятичное рассмотрен ниже). После выполнения подпрограммы bin16BCD5, МП опрашивает состояние кнопок мСек и Сек. Если нажата кнопка Сек (индикация результата измерения производится в секундах), то тогда МП путем выдачи с линии РА7 логической единицы индицирует точку разделяющую целую часть числа от дробной. Если не нажата ни одна из двух кнопок или нажаты все, то тогда индикация результата измерения производится не будет. После того как произведется индикация результата измерения (через линии порта D и C) МП возвращается в основную программу. На этом цикл работы программы заканчивается .
Алгоритм подпрограмма перевода двоичного шестнадцати разрядного числа в двоично-десятичное
Арифметико-логическое устройство AVR-микроконтроллеров (как и других микропроцессоров) выполняет элементарные арифметические и логические операции над числами, представленными в двоичном коде. В двоичном коде считываются результаты преобразования АЦП, в двоичном коде (в формате целых чисел или чисел с плавающей точкой) удобно выполнять обработку результатов измерения. Однако, когда окончательный результат отображается на индикаторе, он должен быть преобразован в десятичный формат, удобный для восприятия человеком.
Форматы представления десятичных чисел
В настоящее время распространены два формата представления десятичных чисел в микропроцессорах — упакованный двоично-десятичный код (BCD-Binary-Coded Decimal).
Упакованный BCD-код — это такое представление десятичного числа, когда каждая десятичная цифра представляется 4-х битным двоичным позиционным кодом 8-4-2-1. При этом байт содержит две десятичные цифры. Младшая десятичная цифра занимает правую тетраду (биты 3 : 0), старшая — левую тетраду (биты 7 : 4). Многоразрядные BCD-числа занимают несколько смежных байт. Если число является знаковым, то для представления знака в BCD-формате отводится старшая тетрада старшего байта
Алгоритм подпрограммы bin16bcd5 заключается в следующем. Предположим, что имеется целое беззнаковое 16-битное число (диапазон от 0 до 65535). Очевидно, что необходимо найти 5 десятичных цифр. Способ преобразования заключается в том, чтобы, вычитая из исходного числа число 10000, сначала определить десятичную цифру десятков тысяч. Затем находится цифра тысяч последовательным вычитанием числа 1000 и т. д. Вычитание каждый раз производится до получения отрицательной разности с подсчетом числа вычитаний. При переходе к определению каждого следующего десятичного разряда в регистрах исходного числа восстанавливается последняя положительная разность. После того, как будет найдена десятичная цифра десятков, в регистрах исходного числа останется десятичная цифра единиц.
3. РАЗРАБОТКА И РАСЧЕТ ЭЛЕМЕНТОВ ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ
3.1 Выбор микропроцессорного комплекта
В соответствии с ТЗ ядром измерительного прибора послужила однокристальная микро-ЭВМ AVR90S8515 фирмы Atmel.
Основные характеристики однокристальной микро-ЭВМ AVR90S8515:
• AVR RISC архитектура — архитектура высокой производительности и малогопотребления
• 120 команд, большинство которых выполняется за один машинный цикл
• 8 Кбайта Flash ПЗУ программ, с возможностью внутрисистемногоперепрограммирования и загрузки через SPI последовательный канал, 1000 цикловстирание/запись
• 512 байтов ЭСППЗУ данных, с возможностью внутрисистемной загрузки через SPIпоследовательный канал, 100000 циклов стирание/запись
• 512 байтов встроенного СОЗУ
• 32 x 8 бит регистра общего назначения
• 32 программируемых линий ввода/вывода
• 16-разрядный и 32-разрядный формат команд
• Диапазон напряжений питания от 2,7 В до 6,0 В
• Полностью статический прибор — работает при тактовой частоте от 0 Гц до 8 МГц
• Длительность командного цикла: 125 нс, при тактовой частоте 8 МГц
• 8-разрядный и 16-разрядный (с режимами сравнения и захвата) таймеры/счетчики
• Сдвоенный ШИМ с 8, 9 или 10-разрядным разрешением
• Программируемый полный дуплексный UART
• Два внешних и десять внутренних источников сигнала прерывания
• Программируемый сторожевой таймер с собственным встроенным генератором
• Встроенный аналоговый компаратор
• Режимы энергосбережения: пассивный (idle) и стоповый (power down)
• Блокировка режима программирования
• Промышленный (-40°C. 85°C) и коммерческий (0°C. 70°C) диапазоны температур
• 40-выводной корпус PDIP и 44-выводные корпуса TQFP и PLCC
КМОП микроконтроллер AT90S8515 реализован по AVR RISC архитектуре
(Гарвардская архитектура с раздельной памятью и раздельными шинами для памятипрограмм и данных) и совместим по исходным кодам и тактированию с 8-разряднымимикроконтроллерами семейства AVR (AT90SXXX). Выполняя команды за один тактовыйцикл, прибор обеспечивает производительность, приближающуюся к 1 MIPS/МГц. AVRядро объединяет мощную систему команд с 32 8-разрядными регистрами общегоназначения и конвейерное обращение к памяти программ. Шесть из 32 регистровмогут использоваться как три 16-разрядных регистра-указателя при косвенной адресациипространства памяти. Выполнение относительных переходов и команд вызовареализуется с прямой адресацией всех 4К адресного пространства. Адресапериферийных функций содержатся в пространстве памяти ввода/вывода. Архитектураэффективно поддерживает как языки высокого уровня, так и программы на языкахассемблера.Встроенная загружаемая Flash память обеспечивает внутрисистемноеперепрограммирование с использованием интерфейса SPI (в последовательномВстроенная загружаемая Flash память обеспечивает внутрисистемноеперепрограммирование с использованием интерфейса SPI (в последовательномнизковольтовом режиме) или с использованием стандартных программаторовэнергонезависимой памяти (в 12-вольтовом параллельном режиме).Потребление прибора в активном режиме составляет 3,5 мА и в пассивномрежиме 1 мА (при VCC =3 В и f=4 МГц). В стоповом режиме, при работающемсторожевом таймере, микроконтроллер потребляет 50 мкА.низковольтовом режиме) или с использованием стандартных программаторовэнергонезависимой памяти (в 12-вольтовом параллельном режиме).Потребление прибора в активном режиме составляет 3,5 мА и в пассивномрежиме 1 мА (при VCC =3 В и f=4 МГц). В стоповом режиме, при работающемсторожевом таймере, микроконтроллер потребляет 50 мкА.
Амплитуда импульса Um — наибольшее отклонение импульса от исходного уровня.
Длительность импульса tи. Измеряется на различных уровнях Um. Длительность бывает
активная, при которой обычно срабатывает импульсное устройство — на уровне 0,5Um (tиа).
Длительность фронта (tф) — время нарастания напряжения от 0,1Um до 0,9Um (может быть полной и активной).
Длительность среза (tc) — время возвращения напряжения к исходному уровню от 0,9Um до 0,1Um.
Спад вершины импульса (Um). Описывается коэффициентом спада
Величина коэффициента спада колеблется в диапазоне от 0,01 до 0,1.
В качестве дополнительного можно отметить такой параметр как крутизна — скорость нарастания (спада) импульса.
Крутизна фронта определяется как
Крутизна среза определяется как
Определяется крутизна в [В/с].
Прямоугольный импульс обладает бесконечно большой крутизной.
Параметры последовательности импульсов.
Понятно, что на практике используются не единичные импульсы, а их последовательность.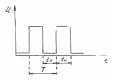
Рассмотрим параметры последовательности импульсов.
Период следования (повторения) — Т.
Частота следования (повторения) — F. Это есть число импульсов в cекунду.
Выражение для определения частоты имеет вид:
Скважность -отношение интервала между импульсами (периода) (скважины) к длительности самого импульса (Q).
Как правило, скважность всегда должна быть больше 1 (Q>1).
Коэффициент заполнения — величина, обратная скважности ()
Основными параметрами импульсов являются амплитуда, длительность импульса, длительность фронта, длительность среза, спад вершины импульса.
Параметрами последовательности импульсов являются период следования импульсов, частота следования импульсов, скважность, коэффициент заполнения.
2. Переходные процессы в линейных цепях.
В импульсной технике широко применяются устройства формирующие напряжение одной формы из напряжения другой формы. В качестве входного сигнала могут использоваться сигналы гармонической или скачкообразной формы.
Устройства, предназначенные для решения задач формирования импульсов называются формирующими.
Формирующие устройства строятся с использованием линейных и нелинейных элементов. При этом, различие между получаемыми устройствами заключается в характере изменения ВАХ используемых приборов.
Рассмотрим линейные формирующие цепи.
Линейная цепь состоит из элементов R, L, C параметры которых не зависят от значения и направления протекающего тока и приложенного напряжения.
Процессы в цепях, содержащих конденсаторы (и катушки индуктивности), могут быть как установившиеся, так и переходные.
В установившихся режимах напряжения на элементах и токи в ветвях остаются неизменными (в цепях переменного тока остаются неизменными амплитудные значения напряжений и токов).
Процесс перехода цепи от одного энергетического установившегося режима к другому называют переходным. Переходные процессы возникают как вследствие коммутаций (включения или выключения источников питания, подключение или отключение элементов цепей), так и при возникновении аварийных режимов (обрыве или коротком замыкании какой-либо части электрических цепей).
Назначение линейных цепей.
В импульсной технике линейные цепи используются для формирования и преобразования импульсов, для получения желаемого изменения формы передаваемого напряжения.
Классификация линейных цепей
Основными линейными цепями являются:
формирующие цепи (формирующие линии) и т.д.
Как основополагающие, рассмотрим дифференцирующие и интегрирующие цепи.
В связи с необходимостью микроминиатюризации в импульсной технике преимущественно используются дифференцирующие интегрирующие цепи на базе R и C. (R и L не используются).
Поэтому рассмотрим именно такие дифференцирующие и интегрирующие цепи на базе R и C.
Возникновение переходных процессов связано с особенностями изменения энергии электрического поля конденсаторов (изменение энергии не может происходить мгновенно, скачком, т.е. напряжение на конденсаторе мгновенно не изменяются:
В цепях, содержащих только резистивные элементы, энергия не запасается и переходные процессы не возникают.
Линейная RC имеет вид: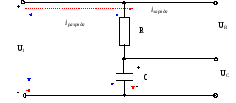
Физическая интерпретация процессов происходящих в RC- цепях такова: в момент скачкообразного увеличения напряжения, напряжение на незаряженном конденсаторе сохранит свое первоначальное значение равное нулю (конденсатор не может зарядиться мгновенно); напряжение резистора примет значение входного сигнала; ток в цепи максимален. С течением времени, по мере зарядки конденсатора, напряжение на конденсаторе будет возрастать, ток в цепи и напряжение на резисторе уменьшатся. Если длительность входного импульса напряжения не меньше времени переходного процесса, то напряжение на конденсаторе к моменту окончания импульса станет равным входному напряжению, напряжение на резисторе — нулю.
При скачкообразном уменьшении входного напряжения резистор и конденсатор оказываются соединенными параллельно. Следовательно, напряжение на резисторе принимает значение, равное напряжению на конденсаторе, но с полярностью, противоположной полярности напряжения на конденсаторе в момент включения импульса. С течением времени, по мере разряда конденсатора, напряжение на элементах будет уменьшатся до нуля.
Рассмотрим работу RC схемы более подробно.
При подаче на вход прямоугольного импульса длительностью tи и амплитудой Um происходит заряд конденсатора C. После окончания действия импульса конденсатор разряжается по цепи через сопротивление R, плюс источника питания, минус источника питания. Известно, что RC цепь обладает постоянной времени tц которая определяется как
Поэтому возможны случаи, когда tи>>tц и, наоборот, tи
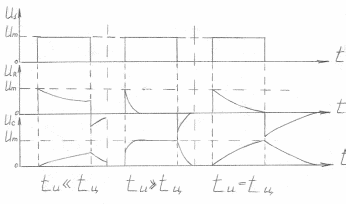
В зависимости от соотношения tц/tи напряжение на элементах цепи меняется по разному.
