
Исполнительные двигатели постоянного тока
 Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности.
Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности.
Исполнительные двигатели обычно работают в условиях частых пусков, остановок и реверсов. Они отличаются значительным начальным пусковым моментом и быстродействием. Зависимости вращающего момента и скорости якоря от напряжения управления у них в большинстве случаев близки к линейным.
 В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным .
В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным .
Обычно используют якорное управление. Изменение полярности напряжения управления вызывает противоположное направление вращения якоря.
Исполнительные двигатели постоянного тока изготовляют номинальной мощности от долей ватта до 600 Вт нормальной и специальной конструкций.
 Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.
Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.
К двигателям специальной конструкции относятся магнитоэлектрические машины с возбуждением основного магнитного поля с помощью постоянных магнитов, а также малоинерционные машины, отличающиеся конструкцией якоря. К последним относятся: двигатели с полым немагнитным якорем — полым тонкостенным цилиндром из пластмассы с запрессованной обмоткой из медного провода с внутренним неподвижным ферромагнитным магнитопроводом, укрепленным на подшипниковом щите, и менее долговечные двигатели с дисковым якорем — тонким немагнитным диском из керамики, текстолита, стекла, а иногда из алюминия с печатной обмоткой, представляющей совокупность радиально расположенных по обе стороны диска проводников из медной фольги, по которой скользят серебряно-графитные щетки. Названные конструкции отличаются малым моментом инерции якоря, что обеспечивает высокое быстродействие исполнительного двигателя.

Масса исполнительных двигателей постоянного тока в 2 — 4 раза меньше, чем масса одинаковых по номинальной мощности исполнительных асинхронных двигателей, а к. п. д. их при номинальной мощности 5. 10 Вт составляет около 0,3 и достигает значения 0,65 и несколько выше для двигателей номинальной мощностью 200 — 300 Вт.

Тахогенераторы постоянного тока
 Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.
Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.
Тахогенераторы бывают магнитоэлектрические с возбуждением основного магнитного поля с помощью постоянных магнитов и электродинамические с электромагнитным возбуждением, обусловленным М. д. с. обмотки возбуждения, питаемой от независимого источника электрической энергии постоянного напряжения.
Выходное напряжение тахогенератора в режиме холостого хода изменяется линейно в зависимости от скорости якоря, а при нагрузке эта линейность несколько нарушается, причем тем больше, чем меньшим сопротивлением обладает измерительный прибор, присоединенный к зажимам якоря. Все же для каждого тахогенератора существует относительно небольшой диапазон измеряемых скоростей, в пределах которого при определенном достаточно большом сопротивлении измерительного прибора и неизменных условиях цепи возбуждения выходную характеристику можно считать практически линейной.
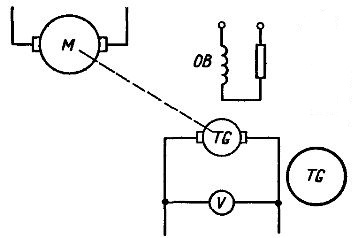
Схема включения тахогенератора постоянного тока независимого возбуждения
 Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.
Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.
Неточность установки щеток по геометрической нейтрали коллектора тахогенсратора приводит к асимметрии выходного напряжения, т. е. к генерированию двух различных напряжений в обмотке якоря при противоположных направлениях его вращения с одинаковой скоростью. При правильном расположении щеток асимметрия напряжений находится в пределах от 0,3 до 1% номинального напряжения тахогенератора.

Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
Содержание
Принцип действия [ править | править код ]
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока [ править | править код ]

Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора, прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока являются удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал меняет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
F r o t = U o u t S t , <displaystyle F_
Асинхронные тахогенераторы переменного тока [ править | править код ]
По конструкции подобны асинхронным электродвигателям с короткозамкнутым ротором. Короткозамкнутый ротор обычно выполнен в виде полого алюминиевого или медного цилиндра. На статоре такого тахогенератора с магнитными потоками, ориентированными относительно друг друга под углом 90°, расположены две обмотки, одна из которых (обмотка возбуждения) питается переменным синусоидальным током постоянной частоты и постоянной амплитуды, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр переменного напряжения, отградуированный, например, в об/мин), либо вход автоматической системы управления.
Принцип действия основан на увлечении магнитного потока, наведенного в роторе короткозамкнутым ротором при его вращении. При неподвижном роторе, так как магнитные поля обмотки возбуждения и выходной обмотки взаимно перпендикулярны, выходное напряжение равно нулю. При вращении ротора эта перпендикулярность нарушается и в выходной обмотке наводится ЭДС, пропорциональная скорости вращения.
Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в обмотке возбуждения, такой тип тахогенератора и называется асинхронным.
Асинхронный тахогенератор также позволяет определять направление вращения ротора, при смене направления фаза выходного сигнала изменяется на 180°.
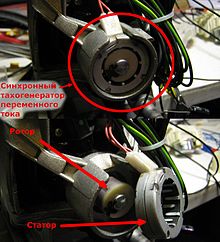
Синхронные тахогенераторы переменного тока [ править | править код ]

Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Недостаток синхронного тахогенератора — невозможность определения направления вращения, что в некоторых применениях нежелательно.
Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами — частотным и амплитудным.
Синхронные и асинхронные тахогенераторы обладает бо́льшим сроком службы по сравнению с тахогенераторами постоянного напряжения, так как в них отсутствуют коллекторно-щёточный узел.
Частотный способ определения скорости вращения [ править | править код ]
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных.
Скорость вращения вычисляется путём определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
F r o t = F o u t p , <displaystyle F_
>,>
Недостатком частотного метода является то, что для более точного определения скорости необходимо больше времени, и за это время скорость может значительно измениться. Из этого следует, что чем больше времени тратится на накопление импульсов для определения частоты, тем больше динамическая погрешность в измерениях, поэтому в следящих системах автоматического регулирования скорости вращения происходит запаздывание реакции на возмущение и это в некоторых применениях нежелательно.
Для снижения динамической погрешности используют тахогенераторы с бо́льшим числом полюсов, это позволяет сократить время определения выходной частоты, а значит и время реакции управляющей системы авторегулирования.
Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
F o u t = N T 1 + . . . + T N = N ∑ i = 1 N T i , <displaystyle F_
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит вход частотного детектора должен быть спроектирован для приема входного сигнала с изменяющейся в широких пределах амплитудой, что иногда является недостатком из-за усложнения схемы.
Амплитудный способ определения скорости вращения [ править | править код ]

Такой способ определения частоты не очень точен из-за зависимости от температуры, зазора между ротором и статором, от изменений магнитного потока магнита ротора при старении, а также из-за влияния частотной интермодуляции на реактивные элементы цепи. Но, в ряде случаев, данный способ оправдывает себя, компенсируя недостатки простотой схемы управления.
По мере увеличения скорости вращения, ЭДС, генерируемая в обмотке статора СТГ, будет возрастать. Для снятия показаний с тахогенератора и приведения их к удобной форме используется одно- или двухполупериодный выпрямитель и НЧ фильтр, сглаживающий пульсации.
Отношение напряжения к частоте вращения ротора описывает параметр крутизна выходного напряжения, или коэффициент преобразования, представляемый обычно в m V ⋅ R P M <displaystyle mVcdot RPM>
F r o t = U o u t 60 S t , <displaystyle F_
Достоинства и недостатки [ править | править код ]
- Пара тахогенератор — тахометр не требует дополнительных источников питания, просто и достаточно надёжно в работе.
- Тахогенераторы не могут измерять очень медленное вращение — амплитуда генерируемого сигнал становится очень малой.
- Тахогенераторы создают дополнительную крутящий момент трения на вращающийся вал, что вносит некоторую ошибку в измерения, но обычно она несущественна.
- Содержат трущиеся детали, и поэтому требуют периодическое техническое обслуживание.
Иные датчики скорости вращения [ править | править код ]
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором — крыльчаткой связанной с валом — датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
Тахогенераторы постоянного тока — это маломощные электрические машины, работающие в генераторном режиме с возбуждением от независимой обмотки (электродинамические) или постоянных магнитов (магнитоэлектрические) и отличающиеся от других типов тахогенераторов, прежде всего, наличием щёточно-коллекторного узла. В своём классе, машин постоянного тока, мало чем отличаются от них по конструкции, но по сравнению с ними выделяется малыми габаритными размерами.

Выходным сигналом является аналоговое напряжение, величина и полярность которого зависят от частоты и направления вращения ротора, соответственно.

Где : Uout – выходное напряжение (Uвых – на рисунке 1); Frot – частота вращения ротора в Гц; St –крутизна выходной характеристики в mV/мин-¹, характеризующая чувствительность тахогенератора.
Зная величины Uout и St, можно легко вычислить частоту вращения ротора в Гц:

На практике, выходная характеристика тахогенератора не имеет точной линейной зависимости, что иногда является существенным недостатком. Основные причины: неточности при изготовлении — неравномерность воздушных зазоров, нелинейное сопротивления переходного контакта (щётка-коллектор), размагничивающее действие обусловленное реакцией якоря, непостоянное значение тока обмотки возбуждения, причиной которого является изменением её электрического сопротивления из-за температурных колебаний (нагревов и т.п.,). Если идеализировать, что магнитный поток тахогенератора и сопротивление нагрузки не меняют своих значений в процессе проведения измерений, то получим результат (сплошные линии на рисунке 2, а) в виде линейных характеристик различной крутизны, в зависимости от значений сопротивления нагрузки, из которого видно — чем больше значение сопротивления нагрузки тем больше крутизна выходной характеристики тахогенератора.

Следует также обратить внимание и на рисунок 2, б, где показано зону нечувствительности тахогенератора (отрезок 0-а), обусловленную наличием щёточно-коллекторного узла. Для того чтобы уменьшить зону нечувствительности надо прежде всего стараться применять щётки с минимальным сопротивлением, содержать их в чистоте, а также по возможности применять нагрузку, имеющую как можно большее сопротивление.
В подавляющего большинства тахогенераторов постоянного тока крутизна выходной характеристики находится в пределах St =3…1000 mV/мин-¹ ( с постоянными магнитами обычно имеют меньшие значения крутизны), номинальные частоты вращения в пределах Frot =1000…10000 мин-¹. Наибольшее распространение получили машины где Frot=1500…3000 мин-¹.
- значительная выходная мощность, при относительно малых габаритах и массе;
- удобная аналоговая форма представления выходного сигнала, полярность которого позволяет (без применения специальных схемных решений) получать информацию о направлении вращения ротора, а величина выходного напряжения позволяет вычислить измеряемую частоту вращения (чем больше, тем больше частота);
- при применении тахогенератор с магнитоэлектрическим возбуждением (от постоянных магнитов) не требуется дополнительный источник питания для возбуждения тахогенератора, что в свою очередь даёт возможность просто и довольно надёжно применять тахогенераторы постоянного тока для решений различных технических задач;
- достаточно широко распространены;
- наличие щёточно-коллекторного узла:
- при вращении ротора, из-за переключений (коммутаций) обмоток коллектора, неравенств их проводимостей, вибрации щёток, и т.д. появляются дополнительные пульсации, которые могут принимать значения достаточные для создания радиопомех и других электромагнитных наводок;
- уменьшает сроки эксплуатации по сравнению с другими типами тахогенераторов;
- в некоторых случаях может создавать дополнительную механическую нагрузку, поскольку содержит трущиеся детали (щётки, контактные кольца);
- при неправильном геометрическом расположении щёток появляется асимметрия выходного напряжения;
Несмотря на указанные выше недостатки, тахогенераторы постоянного тока широко применяются в системах автоматического регулирования, электроприводе, для измерений скорости вращения, а также в качестве датчиков обратной связи и так далее.
Пример конструкции тахогенераторов постоянного тока изображен на рисунке приведенном ниже. На рисунке 3, а) – с возбуждением от постоянных магнитов (магнитоэлектрический), на рисунке 3, б) — с возбуждением от независимой обмотки (электродинамический).
