
 Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [ n =f(M) ] можно записать в виде

где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R’, куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
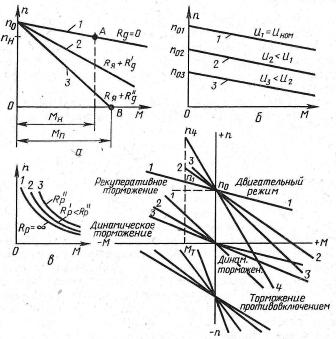
Рис. 1. Механические характеристики двигателей постоянного тока: а — при изменении сопротивления в цепи ротора, б — при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в — при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г — при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
Естественная механическая характеристика двигателя постоянного тока паралельного возбуждения ( рис. 8.5 ) – жёсткая, потому что ее жёсткость
β = Δ  / Δω ≤ 10%.
/ Δω ≤ 10%.

Рис. 10.2 Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточно стабильна (т.е. изменяется незначительно).
Такие двигатели применяются там, где при изменении нагрузки механизма в широких пределах скорость двигателя не должна изменяться резко – в электроприводах насосов, вентиляторов и т.п.
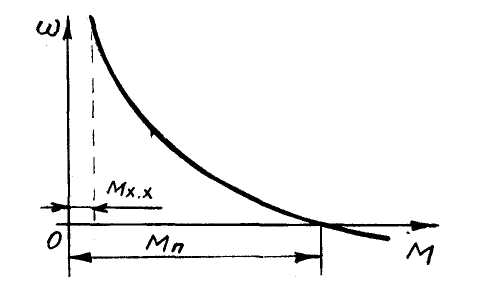
Рис. 10.3 Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения (рис. 10.3 ) – мягкая, потому что ее жёсткость
β = Δ  / Δω > 10%.
/ Δω > 10%.
Это означает, что при изменении электромагнитного момента двигателя даже в небольших пределах его скорость изменяется значительно.
Напомним две характерные особенности этого двигателя двигателя постоянного тока последовательного возбуждения:
1. При уменьшении механической нагрузки на валу или ее отсутствии ( =  )
)
скорость двигателя резко увеличивается, двигатель «идет вразнос». Поэтому этот двигатель нельзя оставлять без нагрузки на валу;
2. При пуске двигатель развивает пусковые моменты  больше, чем у двигателей других типов.
больше, чем у двигателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты (при трогании троллейбуса с места).

Рис. 10.4 Естественные механические характеристики двигателей постоянного тока смешанного возбуждения: 1 с – параллельно-последовательным возбуждением;
2 — с последовательно –параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанного возбуждения промежуточная между характеристиками двигателей паралельного и последовательного возбуждения, т.к. магнитный поток возбуждения создается совместным действием обеих обмоток – параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
1. с паралельно – последовательным возбуждением, у которых основную часть результирующего магнитного потока создает параллельная обмотка (до 70%, остальные 30% –последовательная);
2. с последовательно – параллельным возбуждением, у которых основную часть результирующего магнитного потока создает последовательная обмотка (до 70%, остальные 30% –параллельная).
Поэтому график механической характеристики двигателя первого вида более жесткий, чем у двигателя второго вида.
Обе механические характеристики – мягкие, потому что их жесткость
β = Δ / Δω > 10%.
На судах двигатели смешанного возбуждения применяются в регулируемых электроприводах – лебедках, кранах, брашпилях и шпилях.
Дата добавления: 2015-05-08 ; просмотров: 896 | Нарушение авторских прав
Для получения механической характеристики двигателя постоянного тока с параллельным возбуждением необходимо найти зависимость угловой скорости вращения от момента двигателя. Это возможно, если учесть, что момент, развиваемый двигателем, связан с током якоря и магнитным потоком зависимостью
 (1.1)
(1.1)
где СМ – коэффициент машины;
Ф – магнитный поток машины;
I – сила тока в якоре.
Подставив значение тока I, найденное из (1.1) , в выражение электромеханической характеристики
 (1.2)
(1.2)
Получим выражение для механической характеристики
 (1.3)
(1.3)
где U — напряжение на зажимах электродвигателя, В;
w — угловая скорость вала двигателя, с -1 ;
Ra — сопротивление обмотки якоря, Ом;
Ф — магнитный поток машины, Вб;
Rдоб — добавочное сопротивление, Ом;
Сe – конструктивная постоянная двигателя.
Для построения механических характеристик (естественной и искусственных) двигателя параллельного возбуждения достаточно знать лишь две её точки, поскольку все механические характеристики теоретически представляют собой прямые линии. Эти две точки могут быть любыми. Однако построение естественной механической характеристики удобно производить по точкам, одна из которых соответствует номинальному моменту двигателя и номинальной скорости, а другая – скорости идеального холостого хода. Естественная характеристика получается при номинальных параметрах: номинальном напряжении, номинальном токе возбуждения, отсутствии добавочного сопротивления в цепи якоря.
Координаты точек определяются следующим образом:
1. 

2.  ;
; 
Так как в каталогах внутреннее сопротивление якоря обычно не указывается, то его ориентировочно определяют, приняв, что половина всех потерь в двигателе при номинальной нагрузке связана с потерями в меди якоря:
 Ом, (1.4)
Ом, (1.4)
где UH – номинальное напряжение, В;
hн – номинальный КПД двигателя;
Rн – номинальное сопротивление.
При изменении одного из параметров уравнения механической характеристики получаются искусственные характеристики. Реостатные характеристики также строятся по точке холостого хода и точке, в которой момент равен номинальному, а угловая скорость, соответствующая номинальному моменту, определяется по соотношению
 (1.5)
(1.5)
Пример 1
Рассчитать и построить естественную и искусственную механические характеристики и определить их жесткость для двигателя постоянного тока параллельного возбуждения по следующим справочным данным:
Решение
Естественная механическая характеристика ДПТ параллельного возбуждения может быть построена по двум характерным точкам:
Номинальная угловая скорость:

Номинальный момент двигателя:

Определим сопротивление якоря:

Скорость идеального холостого хода может быть определена по номинальным параметрам:

Для определения координат искусственной реостатной характеристики определим wн.иск при номинальном моменте и сопротивлении в цепи якоря Rдоб = 10 Ом.

Коэффициент жесткости механических характеристик:
 Следовательно, чем больше Rдоб, тем меньше жесткость (β) механической характеристики.
Следовательно, чем больше Rдоб, тем меньше жесткость (β) механической характеристики.

1 — естественная механическая характеристика (ЕМХ), βЕМХ=7,54;
2 — искусственная механическая характеристика (ИМХ), βИМХ=3,05.
Рис. 1.1 – Механические характеристики ДПТ параллельного возбуждения (П11).
Дата добавления: 2015-02-25 ; просмотров: 7554 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
