
 Механические характеристики асинхронных двигателей могут быть выражены в виде n=f(M) или n = f ( I ). Однако часто механические характеристики асинхронных двигателей выражаются в виде зависимости M = f ( S), где S — скольжение, S = (nc-n)/nc , где n с — синхронная скорость.
Механические характеристики асинхронных двигателей могут быть выражены в виде n=f(M) или n = f ( I ). Однако часто механические характеристики асинхронных двигателей выражаются в виде зависимости M = f ( S), где S — скольжение, S = (nc-n)/nc , где n с — синхронная скорость.
На практике для графического построения механической характеристики пользуются упрощенной формулой, называемой формулой Клосса:

здесь: Мк — критическое (максимальное) значение момента. Этому значению момента отвечает критическое скольжение

Формула Клосса применяется при решении вопросов, связанных с электроприводом, осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно построить график механической характеристики по паспортным данным асинхронного двигателя. Для практических расчетов в формуле при определении критического момента перед корнем следует принимать во внимание только знак плюс.
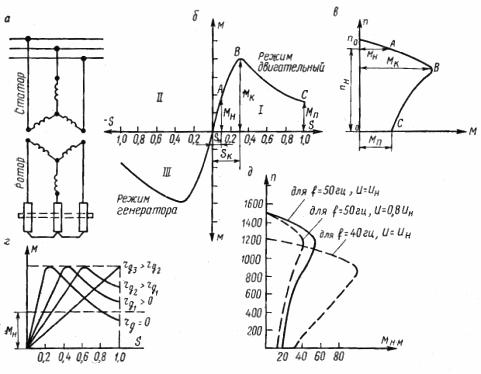
Рис. 1. Асинхронный двигатель: а — принципиальная схема, б — механическая характеристика М=f(S) — естественная в двигательном и генераторном режимах, в — естественная механическая характеристика n=f(М) в двигательном режиме, г — искусственные реостатные механические характеристики, д — механические характеристики для различных напряжений и частот.

Асинхронный двигатель с короткозамкнутым ротором
Как видно из рис. 1, механическая характеристика асинхронного двигателя располагается в I и III квадрантах. Часть кривой в I квадранте соответствует положительному значению скольжения и характеризует двигательный режим работы асинхронного двигателя, а в III квадранте — генераторный режим. Наибольший практический интерес представляет двигательный режим.
График механической характеристики двигательного режима содержит три характерные точки: А, В, С и условно может быть подразделен на два участка: ОВ и ВС (рис. 1, в).
Точка А соответствует номинальному моменту двигателя и определяется по формуле Мн = 9,55 •10 3 • (P н/ n н)
Этому моменту соответствует номинальное скольжение, которое для двигателей общепромышленного применения имеет величину в пределах от 1 до 7%, т. е. Sн=1 — 7%. При этом мелкие двигатели имеют большее скольжение, а крупные — меньшее.
Двигатели с повышенным скольжением , предназначенные для работы с ударной нагрузкой, имеют S н
15%. К ним относятся, например, двигатели единой серии АС.
Точка С на характеристике соответствует величине начального вращающего момента , возникающего на валу двигателя при пуске. Этот момент Мп носит название начального, или пускового. Скольжение при этом равно единице, а скорость — нулю. Величину пускового момента легко определить по данным справочной таблицы, где указывается отношение пускового момента к номинальному Мп/Мн.
Величина пускового момента при постоянных величинах напряжения и частоты тока зависит от активного сопротивления в цепи ротора. При этом вначале с возрастанием активного сопротивления увеличивается величина пускового момента, достигая своего максимума при равенстве активного сопротивления цепи ротора и полного индуктивного сопротивления двигателя. В дальнейшем с возрастанием активного сопротивления ротора величина пускового момента уменьшается, стремясь в пределе к нулю.
Точка В (рис. 1,б и в) соответствует максимальному моменту , который может развивать двигатель на всем диапазоне скоростей от n = 0 до n = n с. Этот момент носит название критического (или опрокидывающего) момента Мк. Критическому моменту соответствует и критическое скольжение Sк. Чем меньше величина критического скольжения Sк, а также величина номинального скольжения S н, тем больше жесткость механической характеристики.
Как пусковой, так и критический моменты определяются через номинальный. Согласно ГОСТ на электрические машины для короткозамкнутого двигателя должно соблюдаться условие Мп/Мн = 0,9 — 1,2, Мк/Мн = 1,65 — 2,5.
Следует иметь в виду, что величина критического момента не зависит от активного сопротивления роторной цепи, в то время как критическое скольжение S к прямо пропорционально этому сопротивлению. Это означает, что с увеличением активного сопротивления роторной цепи величина критического момента остается неизменной, однако максимум кривой момента смещается в сторону возрастающих значений скольжения (рис. 1, г).
Величина критического момента прямо пропорциональна квадрату напряжения, подводимого к статору, и обратно пропорциональна квадрату частоты напряжений и частоты тока в статоре.
Если, например, напряжение, подводимое к двигателю, будет равно 85% номинального значения, то величина критического момента при этом составит 0,85 2 = 0,7225 = 72,25% критического момента при номинальном напряжении.
Обратное явление наблюдается при изменении частоты. Если, например, к двигателю, предназначенному для работы с частотой тока f = 60 гц, подвести ток частотой f = 50 гц, то критический момент получит в (60/50) 2 = 1,44 раза большее значение, чем при своей формальной частоте (рис. 1, д).
Критический момент характеризует собой мгновенную перегрузочную способность двигателя, т. е. он показывает, какую мгновенную (на несколько секунд) перегрузку способен перенести двигатель без каких-либо вредных последствий.

Участок механической характеристики от нулевого до максимального (критического) значения (см. рис. 1 , б и в) носит название устойчивой части характеристики , а участок ВС (рис. 1,в) — неустойчивой части .
Объясняется такое деление тем, что на возрастающей части характеристики ОВ с увеличением скольжения, т.е. с уменьшением скорости, растет развиваемый двигателем момент. Это означает, что при увеличении нагрузки, т. е. при возрастании тормозного момента, уменьшается скорость вращения двигателя, а развиваемый им момент увеличивается. При снижении нагрузки, наоборот, скорость возрастает, а момент уменьшается. При изменении нагрузки на всем диапазоне устойчивой части характеристики происходит изменение скорости вращения и момента двигателя.
Двигатель не в состоянии развить момент больше критического, и если тормозной момент окажется больше, двигатель неминуемо должен остановиться. Происходит, как принято говорить, опрокидывание двигателя .
Механическая характеристика при постоянных U и I и отсутствии добавочного сопротивления в цепи ротора называется естественной характеристикой (характеристика короткозамкнутого асинхронного двигателя с фазным ротором без добавочного сопротивления в цепи ротора). Искусственными, или реостатными, характеристиками называются такие, которые соответствуют добавочному сопротивлению в цепи ротора.
Все значения пусковых моментов различны между собой и зависят от активного сопротивления цепи ротора. Одному и тому же номинальному моменту Мн соответствуют скольжения различной величины. С увеличением сопротивления цепи ротора возрастает скольжение и, следовательно, уменьшается скорость вращения двигателя.
Благодаря включению в цепь ротора активного сопротивления механическая характеристика в устойчивой части вытягивается в сторону возрастания скольжения, пропорционально сопротивлению. Это означает, что скорость двигателя начинает сильно меняться в зависимости от нагрузки на валу и характеристика из жесткой делается мягкой.

Введение
Асинхронный двигатель (АД) — электрический двигатель, нашедший очень широкое применение в различных отраслях промышленности и сельского хозяйства. АД с короткозамкнутым ротором обладает особенностями, обуславливающими его широкое распространение: простота в изготовлении, а это означает низкую начальную стоимость и высокую надежность; высокая эффективность вместе с низкими затратами на обслуживание приводят в итоге к низким общим эксплуатационным расходам; возможность работы непосредственно от сети переменного тока.
Режимы работы асинхронного электродвигателя
Двигатели с короткозамкнутым ротором — асинхронные машины, скорость которых зависит от частоты питающего напряжения, числа пар полюсов и нагрузки на валу. Как правило, при поддержании постоянного напряжения питания и частоты, если игнорируется изменение температуры, момент на валу будет зависеть от скольжения.
Вращающий момент АД можно определить по формуле Клосса:
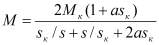 , (1)
, (1)
где  ,
,  — критический момент,
— критический момент,  — критическое скольжение.
— критическое скольжение.
Кроме двигательного режима асинхронный двигатель имеет ещё три тормозных режима: а) генераторный тормозной с отдачей энергии в сеть; б) торможение противовключением; в) динамическое торможение.
При положительном скольжении машина с короткозамкнутым ротором будет действовать как двигатель, при отрицательном скольжении — как генератор. Из этого следует, что ток якоря двигателя с короткозамкнутым ротором будет зависеть только от скольжения. При выходе машины на синхронную скорость ток будет минимальным.
Генераторное торможение АД с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей синхронную. В этом режиме электродвигатель отдаёт в сеть активную энергию, а из сети в электродвигатель поступает реактивная энергия, необходимая для создания электромагнитного поля.
Механическая характеристика для генераторного режима является продолжением характеристики двигательного режима во второй квадрант осей координат.
Торможение противовключением соответствует направлению вращения магнитного поля статора, противоположному вращению ротора. В этом режиме скольжение больше единицы, а частота вращения ротора по отношению к частоте вращения поля статора — отрицательна. Ток в роторе, а следовательно, и в статоре достигает большой величины. Для ограничения этого тока в цепь ротора вводят добавочное сопротивление.
Режим торможения противовключением наступает при изменении направления вращения магнитного поля статора, в то время как ротор электродвигателя и соединённые с ним механизмы продолжают вращение по инерции. Этот режим возможен также и в случае, когда поле статора не меняет направления вращения, а ротор под действием внешнего момента изменяет направление вращения.
В данной статье рассмотрим построение механической характеристики асинхронного двигателя в двигательном режиме.
Построение механической характеристики с помощью модели
Паспортные данные АД ДМТ f 011-6у1: Uф =220 — номинальное фазное напряжение, В; p=3 — число пар полюсов обмоток; n=880 — скорость вращения номинальная, об/мин; Pн=1400 — мощность номинальная, Вт; Iн=5,3 — ток ротора номинальный, А; η = 0.615 — к.п.д. номинальный, %; cosφ = 0.65 — cos(φ) номинальный; J=0.021 — момент инерции ротора, кг·м 2 ; Ki = 5.25 — кратность пускового тока; Kп = 2.36 — кратность пускового момента; Kм = 2.68 — кратность критического момента.
Для исследования эксплуатационных режимов асинхронных двигателей используются рабочие и механические характеристики, которые определяются экспериментально или рассчитываются на основе схемы замещения (СЗ). Для применения СЗ (рис.1) необходимо знать её параметры:
- R1, R2‘, RM — активные сопротивления фаз статора, ротора и ветви намагничивания;
- X1, X2‘, XM — индуктивные сопротивления рассеяния фаз статора ротора и ветви намагничивания.
Эти параметры требуются для определения пусковых токов при выборе магнитных пускателей и контакторов, при выполнении защит от перегрузок, для регулирования и настройки системы управления электроприводом, для моделирования переходных процессов. Кроме того, они необходимы для расчета пускового режима АД, определения характеристик асинхронного генератора, а также при проектировании асинхронных машин с целью сопоставления исходных и проектных параметров [3].
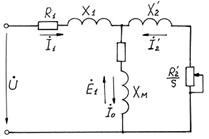
Рис. 1. Схема замещения асинхронного двигателя
Воспользуемся методикой расчёта параметров схемы замещения [3] для определения активных и реактивных сопротивлений фаз статора и ротора. Значения коэффициента полезного действия и коэффициента мощности при частичных нагрузках, необходимые для расчётов, приведены в техническом каталоге [4 стр.10]: pf = 0.5 — коэффициент частичной нагрузки, %; Ppf = Pн·pf — мощность при частичной нагрузке, Вт; η _pf = 0.56 — к.п.д. при частичной нагрузке, %; cosφ_pf = 0.4 — cos(φ) при частичной нагрузке.
Значения сопротивлений в схеме замещения: X1=4.58 — реактивное сопротивление статора, Ом; X2‘=6.33 — реактивное сопротивление ротора, Ом; R1=3.32 — активное сопротивление статора, Ом; R2‘=6.77 — активное сопротивление ротора, Ом.
Построим механическую характеристику асинхронного двигателя по формуле Клосса (1).
Скольжение определяют из выражения вида:
 , (2)
, (2)
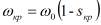
где  — скорость вращения ротора АД, рад/сек,
— скорость вращения ротора АД, рад/сек,
синхронная скорость вращения:
 . (3)
. (3)
Критическая скорость вращения ротора:
 . (4)
. (4)
 . (5)
. (5)
Точку критического момента определим из выражения
 . (6)
. (6)
Пусковой момент определим по формуле Клосса при s=1:
 . (7)
. (7)
По произведенным расчетам построим механическую характеристику АД (рис. 4). Для ее проверки на практике проведем эксперимент.
Построение экспериментальной механической характеристики
При проведении эксперимента используется лабораторный стенд НТЦ-13.00.000 «Электропривод». Имеется система, состоящая из АД, к валу которого в качестве нагрузки подключен двигатель постоянного тока (ДПТ) независимого возбуждения. Необходимо построить механическую характеристику асинхронного двигателя, используя паспортные данные асинхронной и синхронной машин и показания датчиков. Имеем возможность изменять напряжение обмотки возбуждения ДПТ, измерять токи на якоре синхронного и асинхронного двигателя, частоту вращения вала. Подключим АД к источнику питания и будем нагружать его, изменяя ток обмотки возбуждения ДПТ. Проведя эксперимент, составим таблицу значений из показаний датчиков:
Таблица 1 Показания датчиков при нагрузке асинхронного двигателя
38) Механическая характеристика асинхронного двигателя.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
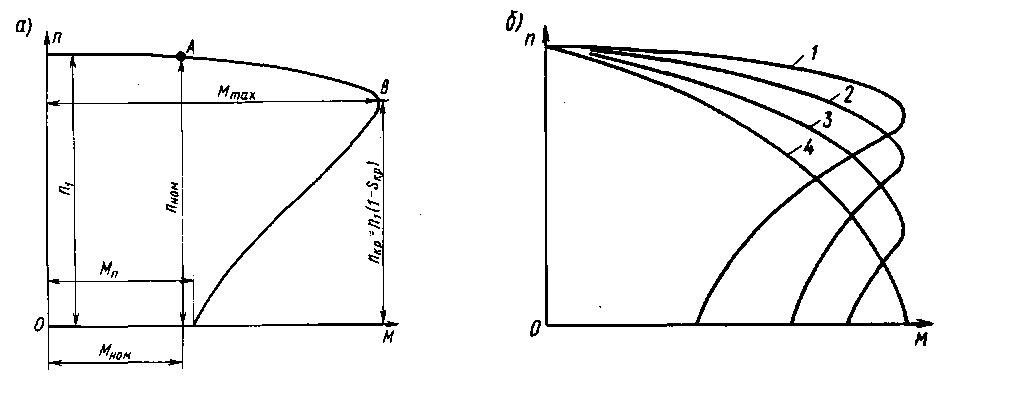
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ .
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
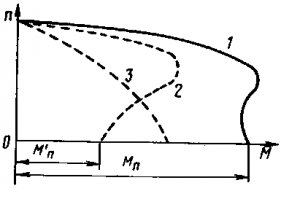 Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
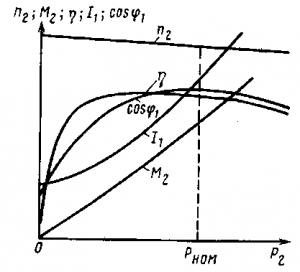 Рис. 264. Рабочие характеристики асинхронного двигателя
Рис. 264. Рабочие характеристики асинхронного двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
