
Как следует из названия, в этой статье мы дадим точное представление о структуре и работе ПИД-контроллера. Однако сначала, давайте познакомимся с ПИД-контроллерами.
ПИД-регуляторы находятся в широком диапазоне применений для управления промышленными процессами. Приблизительно 95% операций с замкнутым контуром в промышленной автоматизации используют ПИД-регуляторы. PID обозначает Пропорционально-интегральная-диференциальная составляющая. Эти три контроллера объединены таким образом, что он создает управляющий сигнал.

В качестве контроллера обратной связи он обеспечивает выход управления на желаемых уровнях. ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов, перед изобретением микропроцессоров. Но сегодня все ПИД-контроллеры обрабатываются микропроцессорами. ПрограммируемыеПрограммируемые логические контроллеры также имеют встроенные настройки ПИД-регулятора. Благодаря гибкости и надежности ПИД-регуляторов, они традиционно используются в системах управления технологическим процессом.
Работа ПИД-регулятора
При использовании недорогого простого контроллера возможны только два состояния управления, например, полностью ВКЛ или полностью ВЫКЛ. Он используется для настроек с ограничением контроля, в котором эти два состояния управления достаточно для целей управления. Однако характер этого контроля ограничивает его использование и, следовательно, заменяется ПИД-контроллерами.
ПИД-регулятор поддерживает выход таким образом, что между переменной процесса и заданной точкой / желаемым выходом с помощью операций замкнутого контура имеется нулевая ошибка. ПИД использует три основных поведения управления, которые объясняются ниже.
П-контроллер:

Пропорциональный или П-регулятор дает выход, который пропорционален текущей ошибке e (t). Он сравнивает желаемую или заданную точку с фактическим значением или значением процесса обратной связи. Полученная ошибка умножается на пропорциональную константу, чтобы получить выход. Если значение ошибки равно нулю, то выход этого контроллера равен нулю.

Этот контроллер требует смещения или ручной сброс при использовании отдельно. Это происходит потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает постоянную ошибку. Скорость реакции возрастает при увеличении пропорциональной константы Kр.
И-контроллер

Из-за ограничения П-контроллера, где всегда существует смещение между переменной процесса и заданным значением, необходим И-контроллер, который обеспечивает необходимые действия для устранения ошибки установившегося состояния. Он интегрирует ошибку в течение периода времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Интегральное управление уменьшает его выход, когда происходит отрицательная ошибка. Он ограничивает скорость реакции и влияет на стабильность системы. Скорость реакции увеличивается за счет уменьшения интегрального усиления Ki.

На приведенном выше рисунке, когда коэффициент усиления И-контроллера уменьшается, ошибка установившегося режима также продолжает уменьшаться. В большинстве случаев контроллер ПИ используется, в частности, когда требуется высокая скорость ответа.
При использовании ПИ-регулятора выход И-контроллера ограничен некоторым диапазоном для преодоления интегральных условий, когда интегральный выход растет даже при нулевом состоянии ошибки из-за нелинейности на установке.
Д-контроллер

И-контроллер не может предсказать будущее поведение ошибки. Поэтому он реагирует нормально после изменения заданного значения. Д-контроллер преодолевает эту проблему, ожидая будущего поведения ошибки. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной. Это дает начало запуска для выхода, тем самым увеличивая системный отклик.

На приведенном выше рисунке ответ контроллера Д больше, по сравнению с контроллером ПИ, а также время установления выходного сигнала уменьшается. Это улучшает стабильность системы за счет компенсации фазового запаздывания, вызванного И-контроллером. Увеличение производного усиления увеличивает скорость реакции..
Итак, наконец, мы заметили, что, объединив эти три контроллера, мы получим желаемый ответ для системы. Различные производители разрабатывают различные алгоритмы ПИД.
Методы настройки ПИД-регулятора
Перед началом работы ПИД-регулятора он должен быть настроен на динамику контролируемого процесса. Дизайнеры дают значения по умолчанию для параметров П, И, Д, и эти значения не могут дать желаемую производительность, а иногда приводят к нестабильности и медленным характеристикам управления. Разработаны различные методы настройки для настройки ПИД-регуляторов и требуют от оператора большого внимания для выбора наилучших значений пропорциональных, интегральных и диференциальных коэффициентов. Некоторые из них приведены ниже.
Метод проб и ошибок: это простой способ настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе сначала нужно установить значения Ki и Kd в нуль и увеличить пропорциональный коэффициент (Kp), пока система не достигнет колебательного поведения. Как только он осциллирует, отрегулируйте Ki (интегральный термин), чтобы колебания остановились и, наконец, отрегулировали Д, чтобы получить быстрый отклик.
Технологическая кривая технологического процесса: это метод настройки с открытым циклом. Он производит ответ, когда к системе применяется шаг ввода. Первоначально мы должны вручную вводить некоторые данные управления в систему и записывать кривую ответа.
После этого нам нужно рассчитать наклон, неподвижное время, время нарастания кривой и, наконец, подставить эти значения в уравнениях П, И и Д, чтобы получить значения коэффициента усиления ПИД.

Метод Zeigler-Nichols: Zeigler-Nichols предложил методы замкнутого контура для настройки ПИД-регулятора. Это метод непрерывного циклирования и метод демпфирования колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний различно. При этом сначала нужно установить постоянную p-контроллера, Kp на определенное значение, а значения Ki и Kd равны нулю. Пропорциональный коэффициент усиления увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Усиление, при котором система производит постоянные колебания, называется конечным усилением (Ku), а период колебаний называется предельным периодом (Pc). Как только это достигнуто, мы можем ввести значения P, I и D в ПИД-контроллере по таблице Zeigler-Nichols, зависит от контроллера, используемого как P, PI или PID, как показано ниже.

Структура ПИД-регулятора
ПИД-регулятор состоит из трех членов, а именно пропорционального, интегрального и диференциального. Объединенная работа этих трех контроллеров дает стратегию управления процессом контроля. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. д. В некоторых приложениях используются ПИД-регуляторы в каскадных схемах, где для достижения контроля используются два или более ПИД.

На приведенном выше рисунке показана структура ПИД-регулятора. Он состоит из блока PID, который дает свой вывод для обработки блока. Процесс / установка состоит из конечных устройств управления, таких как исполнительные механизмы, регулирующие клапаны и другие управляющие устройства для управления различными процессами промышленности / установки.
Сигнал обратной связи от технологической установки сравнивается с уставкой или сигналом u (t), и соответствующий сигнал ошибки e (t) подается на алгоритм ПИД-регулирования. Согласно пропорциональным, интегральным и диференциальным расчетам в алгоритме, контроллер производит комбинированный ответ или управляемый выход, который применяется к устройствам управления установкой.
Все управляющие приложения не нуждаются во всех трех элементах управления. Комбинации, такие как элементы управления PI и PD, очень часто используются в практических приложениях.
Среди множества приборов, предназначенных для коммутации, управления и выполнения других функций хочется отметить ПИД-регулятор, используемый в цепях обратной связи. Он устанавливается в системы с автоматическим управлением и поддерживает на определенном уровне значение какого-либо параметра. В большинстве случаев ПИД-регулятор участвует в регулировке температурных режимов и других величин, участвующих в различных процессах.
Общие сведения о ПИД-регуляторе
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
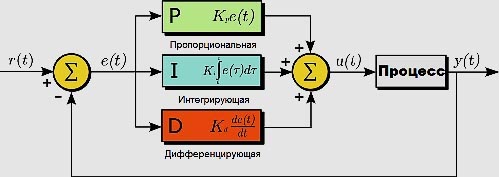
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый – с сигналом рассогласования.
- Второй – с интегралом сигнала рассогласования.
- Третий – с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.
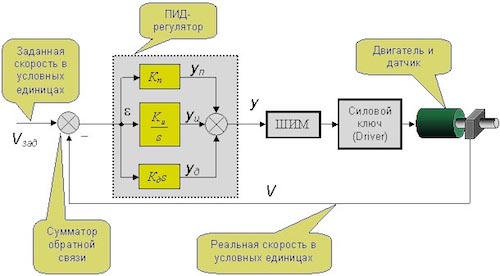
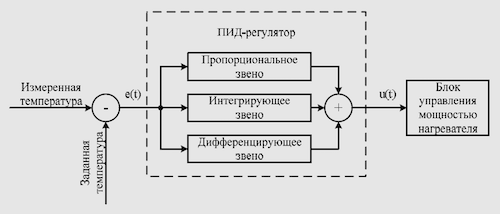
В самом процессе будет участвовать объект, на котором должна поддерживаться заданная температура. Все регулировки осуществляются извне. Другой составляющей будет само устройство с микроконтроллером, которое непосредственно решает имеющуюся задачу. Через измеритель на контроллер поступают данные об уровне температуры на данный момент. Мощность нагревателя отдельно контролируется специальным устройством. Для того чтобы установить требуемое значение параметров температуры, микроконтроллер нужно подключить к компьютеру.
Таким образом, исходными данными служат следующие температурные показатели: текущее значение и уровень, до которого должен нагреться или остыть рассматриваемый объект. На выходе должна получиться величина мощности, передаваемой к нагревательному элементу. Именно она обеспечивает необходимый температурный режим, позволяющий выполнить поставленную задачу. Для ее решения будут задействованы все три компонента, рассмотренные выше.
Три составляющих рабочего процесса ПИД-регулятора
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.
Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения. В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих – дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Теория и практика использования ПИД-устройств
ПИД-регулятор температуры способен поддерживать заданное значение какой-то величины на протяжении определенного промежутка времени. С этой целью используется изменение напряжения и других величин, которые можно рассчитать по специальным формулам. При этом учитывается величина уставки и заданного значения, а также разница или рассогласование.
1. 
2. 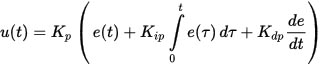
В идеальном варианте напряжение u задается с помощью формулы 1. В ней хорошо просматриваются коэффициенты пропорциональности ПИД-регулятора, предусмотренные для каждого компонента. На практике используется другая формула 2 с коэффициентом усиления, подходящим к любому из трех составляющих.
На практике ПИД-регулирование систем в теоретическом плане анализируются довольно редко. Это связано с недостатком информации о характеристиках регулируемого объекта, нелинейностью и нестабильностью всей системы, когда невозможно использовать дифференцирующий компонент.

Рабочий диапазон устройств, функционирующих на практике, обычно ограничивается верхним и нижним пределами. В связи с нелинейностью, каждая настройка выполняется экспериментально, при подключении объекта к системе управления.
Величина, образуемая с помощью программного алгоритма управления, имеет специфические особенности. Например, для нормальной регулировки температуры может потребоваться вместо одного сразу два прибора: один будет управлять нагревом, а другой – охлаждением. В первом случае осуществляется подача разогретого теплоносителя, а во втором – хладагента. Самым современным прибором считается цифровой ПИД-регулятор, воплотивший в своей конструкции все варианты практических регулировочных решений.
Дифференциальный пропорционально-интегральный регулятор – устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор – прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.

Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента – пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так – берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки – происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе – подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
Третий компонент ПИД – дифференцирующий. Он предназначен для компенсации влияния задержек, возникающих между воздействием на систему и обратной реакцией. Пропорциональный регулятор подает мощность до тех пор, пока температура не достигнет нужной отметки, но при прохождении информации к прибору, особенно при больших значениях, ошибки всегда возникают. Это может привести к перегреву. Дифференциал прогнозирует отклонения, вызванные задержками или воздействием внешней среды, и снижает подаваемую мощность заранее.
Настройка ПИД регулятора
Настройка ПИД-регулятора осуществляется 2 методами:
- Синтез подразумевает вычисление параметров на основании модели системы. Такая настройка получается точной, но требует глубоких познаний теории автоматического управления. Она подвластна только инженерам и ученым. Так как необходимо снимать расходные характеристики и производить кучу расчетов.
- Ручной способ основывается на методе проб и ошибок. Для этого за основу берутся данные уже готовой системы, вносятся некоторые коррективы в один или несколько коэффициентов регулятора. После включения и наблюдений за конечным результатом проводится изменение параметров в нужном направлении. И так до тех пор, пока не будет достигнут нужный уровень работоспособности.
Теоретический метод анализа и настройки на практике применяются крайне редко, что связано с незнанием характеристик объекта управления и кучей возможных возмущающих воздействий. Более распространены экспериментальные методы на основе наблюдения за системой.
Современные автоматизированные процессы реализуются как специализированные модули под управлением программ для настройки коэффициентов регулятора.
Назначение ПИД регулятора
ПИД регулятор предназначен для поддержания на требуемом уровне некой величины – температуры, давления, уровня в резервуаре, расхода в трубопроводе, концентрации чего-либо и т.д., изменением управляющего воздействия на исполнительные механизмы, такие как автоматические регулирующие клапана, используя для этого пропорциональную, интегрирующую, дифференцирующую величины для своей настройки.
Целью использования является получение точного управляющего сигнала, который способен контролировать большие производства и даже реакторы электростанций.
Пример схемы регулирования температуры
Часто ПИД регуляторы используются при регулировке температуры, давайте на простом примере подогрева воды в ёмкости рассмотрим данный автоматический процесс.
В емкости налита жидкость, которую нужно подогреть до нужной температуры и поддерживать её на заданном уровне. Внутри бака установлен датчик измерения температуры – термопара или термометр сопротивления и напрямую связан с ПИД-регулятором.
Для подогрева жидкости будем подавать пар, как показано ниже на рисунке, с клапаном автоматического регулирования. Сам клапан получает сигнал от регулятора. Оператор вводит значение температурной уставки в ПИД-регуляторе, которую необходимо поддерживать в ёмкости.

Если настройки коэффициентов регулятора неверны, будут происходить скачки температуры воды, при этом клапан будет то полностью открыт, то полностью закрыт. В этом случае необходимо рассчитать коэффициенты ПИД регулятора и ввести их заново. Если все сделано правильно, через небольшой промежуток времени система выровняет процесс и температура в ёмкости будет поддерживаться на заданной отметке, при этом степень открытия регулирующего клапана будет находиться в среднем положении.
