
Векторные преобразователи частоты наиболее полно учитывают особенности электродвигателей. У систем с векторными частотными преобразователями высокое быстродействие, точность и широкий диапазон регулировки.
Модели приборов и аналоги
В сводной таблице приведен краткий совокупный обзор частотных преобразователей по производителям. Подробную информацию о линейках и самих приборах можно узнать на соответствующих страницах.
| Производитель | Диапазон мощностей | Вход | Регуляторы процесса | Уровень защиты | Температура среды | Примечания, особенности |
Innovert ITD |
0,4…800 кВт | 1Ф 220В 3Ф 380В |
ПИД | IP31 IP65 |
-10…+40°С | Встроенная защита от перенапряжения, КЗ и обрыва фаз |
Lenze SMV |
0,25…45 кВт | 1Ф или 3Ф 220В 3Ф 380В 3Ф 600В |
ПИД | IP31 IP65 |
-10…+55°С | Доступно дополнительное оборудование |
Delta VFD-E |
0,02…22 кВт | 1Ф 220В 3Ф 460В |
ПИД | IP20 | -10…+50°С | Компактный экономичный преобразователь |
Delta VFD-VE |
0,75…75 кВт | 1Ф 220В 3Ф 460В |
ПИД | IP20 | -10…+40°С | Доступны специализированные модели |
Delta C2000 |
0,75…355 кВт | 3Ф 230В 3Ф 460В |
ПИД | IP20 | -10…+50°С | Усовершенствованный универсальный ПЧ |
Delta CFP2000 |
0,75…90 кВт | 3Ф 460В | ПИД | IP55 | -10…+50°С | Для управления двигателями насосов и вентиляторов, с высокой степенью защиты |
Delta MS300 |
0,2…22 кВт | 1Ф 115В 1Ф 230В 3Ф 230В 3Ф 460В |
IP20/ IP40 |
Улучшенная в сравнении с VFD-E и VFD-M серия векторных приводов. | ||
INSTART |
0,37…630 кВт | 1Ф 220В 3Ф 380В |
ПИД | IP20 | -10…+40°С | Широкий диапазон мощностей. Доступны специализированные модели |
SINEE |
0,4…400 кВт | 1Ф 220В 3Ф 380В |
ПИД | IP20 | -10…+40°С | Широкий диапазон мощностей. Доступны специализированные модели |
ONI A400 |
0,2…3,7 кВт | 1ф 220В 3ф 220В 3ф 380В |
ПИД | IP20, NEMA1 (опция) |
-10…+50°С | Универсальный многофункциональный преобразователь частоты, компактная серия для диапазона небольших мощностей |
ONI K800 |
0,75…37,0 кВт | 3ф 380В | ПИД | IP20, IP21, NEMA1 (опция) |
-10…+50°С | ПЧ с максимально широкими фунциональными возможностями |
ONI M680 |
0,4…132,0 кВт | 3ф 380В | ПИД | IP20, NEMA1 (опция) |
-10…+50°С | Универсальный ПЧ в широком диапазоне мощностей |

Области применения векторных частотных преобразователей
Области применения векторных и скалярных преобразователей схожи, т.к. объект управления один и тот же. Однако, есть сферы, где векторные наиболее предпочтительны:
- Быстродействующие системы, системы позиционирования (станочное оборудование, станкостроение, спецмеханизмы, лебедки, лифты, растягивающие нагрузки)
- Промышленные стиральные машины, компрессоры
- Металлообработка, полиграфия, упаковка/фасовка и т.д.
- Электропривод, где важно обеспечение высокого момента на малых скоростях
- Приложения, где на одной частоте нагрузка меняется в процессе эксплуатации (без четкой зависимости между скоростью и нагрузкой)
- Применения, требующие управления моментом на валу, а также широкого диапазона регулировки скорости
Назначение векторных преобразователей частоты
В общем смысле назначение векторных ПЧ также схоже со скалярными. Отличие заключается в более точном управлении отдельными двигателями:
- Полное управление двигателем на стадиях от его пуска до останова, реализация сложных законов управления + обмен данными
- Высокоточное регулирование скорости в широких пределах, контроль момента нагрузки (в том числе поддержание высокого момента при низких скоростях)
- Защита двигателя/оборудования
- Экономия электрической энергии
Преимущества
Векторные ПЧ обладают преимуществами:
- Наиболее полно учитываются динамические свойства АД, обеспечивается высокий КПД двигателя + контролируется момент на валу
- Высокая точность регулировки скорости
- Высокое быстродействие системы, реакция на изменение нагрузки
- Расширенный диапазон частотного регулирования при определенных моментах (номинальных) + плавный ход в области малых частот
Недостатки
Недостатки преобразователей с векторным управлением:
- Невозможность группового управления. Для решения этой проблемы используйте скалярные преобразователи частоты
- Требуется максимально полная информация о параметрах двигателя + большая сложность вычислений
- Колебания скорости выше по сравнению со скалярным ПЧ (при постоянной нагрузке)
- Более высокая цена
Принцип работы векторных частотных преобразователей
Векторный преобразователь, в отличие от скалярного, использует математическую модель двигателя. В этом случае объектом управления становится не только поле статора, но еще и ротора + учитывается их взаимодействие. Помимо выходной частоты и тока преобразователя используется также фаза выходного тока. Таким образом, обеспечивается почти безынерционное регулирование скорости вращения и момента вала.
Существует две основные системы такого управления АД – бездатчиковые и с обратной связью. В общем, структура скалярного и векторного ПЧ схожа – они преобразуют входное сетевое напряжение в выходное по своим законам регулирования.
Как выбрать частотный преобразователь для электродвигателя самостоятельно или при помощи специалистов
Внедрение частотных преобразователей везде, где используются электродвигатели, — верное решение на пути увеличения доходности предприятия. Благодаря гибкой настройке параметров управления и широкому диапазону регулировок современные частотные преобразователи позволяют ощутимо поднять производительность технологического оборудования различного назначения и снизить издержки даже для устаревшего оборудования.
Самостоятельный подбор ЧП
У вас есть три пути: выбрать общепромышленную модель, выбрать модель для конкретного применения или по характеристикам.
Выбор общепромышленной модели
Это наиболее быстрый и простой вариант. Например, универсальный общепромышленный векторный ЧП большой мощности «Веспер» из линейки EI -9011 в защищенном корпусе класса IP54 подходит для большинства задач и может использоваться для управления приводами практически всех промышленных механизмов в сложных условиях эксплуатации. Минус такого решения — высокая цена универсального ЧП.
Выбор по стандартному ряду мощностей электродвигателей
Это тоже быстрый и удобный вариант. Как правило, номинальная мощность большинства преобразователей соответствует стандартной серии.
Стандартные серии электродвигателей имеют следующие уровни (номинальной) мощности:
| кВт | 0,06 | 0,09 | 0,12 | 0,18 | 0,25 | 0,37 | 0,55 | 0,75 | 1,10 | 1,50 | 2,20 | 3,00 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| кВт | 4,00 | 5,50 | 7,50 | 11,0 | 15,0 | 18,5 | 22,0 | 30,0 | 37,0 | 45,0 | 55,0 | 75,0 |
Преобразователь частоты подбирается такой же мощности, что и двигатель, или чуть большей. Например, если мощность привода 1,5 кВт, то преобразователь может быть 1,5-2 кВт.
Недостаток этого решения — можно переплатить за избыточную мощность частотника, если электродвигатель не нагружается полностью. Или наоборот: если привод часто работает с пиковыми нагрузками, то приобретенный по стандартной серии ЧП может не справляться с обеспечением работоспособности.
Выбор по характеристикам
1. Электропитание и диапазон выходной частоты.
Количество питающих фаз и номинальное напряжение (В) — первое, на что нужно обращать внимание при выборе. Если это не учесть и неправильно подключить оборудование, возникнут аварийные ситуации и, как следствие, техника выйдет из строя. Выпускаются одно- и трехфазные модели с напряжением на 220 В и 380 В соответственно. Однофазная модель ЧП имеет трёх фазный выход для подключения трёхфазного электродвигателя. Есть также высоковольтные мегаваттные установки для особо мощных агрегатов.
Напряжение местных электросетей, а вернее его качество, также необходимо учитывать при выборе ЧП. Несмотря на то, что Российский стандарт предусматривает для однофазной сети 220 В, а для трехфазной 380 В, на деле бывают существенные провалы и скачки. Если произойдет падение входного напряжения, электропривод аварийно остановится, но если будет скачок вверх, он может сгореть. Поэтому чем шире диапазон допустимых значений напряжения прибора, тем лучше (смотреть их нужно в техническом описании). Модели с широким диапазоном стоят дороже.
Частота (Гц) — следующая по важности характеристика, так как непосредственное управление скоростью вращения вала осуществляется с помощью изменения частоты выходного напряжения. Нужно обратить внимание на диапазон значений выходной частоты ПЧ (например, от 0 до 400 Гц). Чем шире диапазон, тем больше возможностей. У преобразователей частоты, на основе инвертора напряжения, выходная частота не зависит от значения частоты напряжения питания. Все ПЧ ООО «Компании Веспер» выполнены по схеме инвертора напряжения с промежуточным звеном постоянного тока.
2. Мощность и номинальный ток.
Выбор частотного преобразователя по мощности и номинальному току применяемого электродвигателя можно осуществить следующими способами:
- по значению номинального тока электродвигателя по формуле: Iпч = (1.05…1.1) х Iдв ;
- на основе полной мощности (кВА), рассчитывается по формуле: Рпч = Uдв х Iдв х √3 / 1000.
Важно, чтобы выходной ток/мощность частотника был равен или превышал номинальный ток/мощность двигателя. Поэтому для правильного выбора необходимо знать номинальные характеристики электродвигателя.
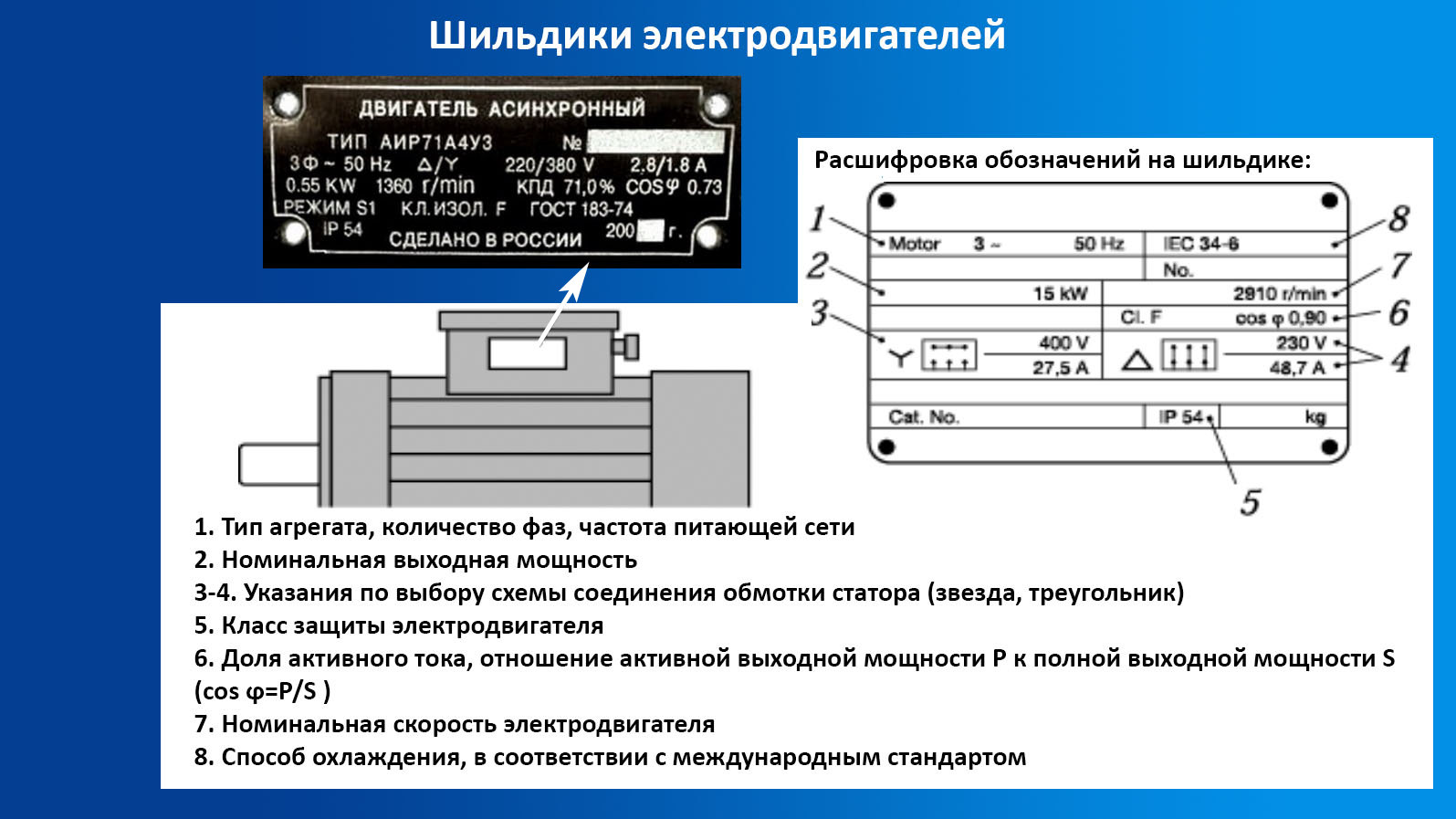
Получить нужные сведения можно из технической документации, по надписям на корпусе (шильдикам) либо провести замеры.
Если двигатель периодически работает с пиковой нагрузкой (значительный пусковой момент на валу, быстрый разгон, резкое торможение), это нужно учитывать. Следует выбирать модель, которая в состоянии обеспечить перегрузочную способность.
3. Методы управления.
Есть два основных метода управления:
Приборы со скалярным управлением стоят дешевле и проще в настройке, но они имеют малый диапазон (1:10) и низкую точность регулировки (погрешность скорости может быть 5-10 %). Такие частотно регулируемые электроприводы целесообразно использовать, когда параметры нагрузки заранее известны и не «плавают» при постоянной частоте. Это могут быть различные механизмы с фиксированным режимом работы, отвечающие за поддержание определенного состояния техпроцесса. К примеру: насосы, вентиляторы, компрессоры.
Векторные приборы более технологичны, имеют широкий диапазон режимов и регулировок (>1:200) с практически нулевой погрешностью, могут поддерживать заданный момент при меняющейся скорости и на сверхмалых оборотах, а также постоянную скорость при резко меняющейся нагрузке. Но они стоят дороже и требуют тонкой индивидуальной настройки специалистом. Такие векторные ЧП подходят для конвейеров, лифтов, транспортеров, кранов, прессов, токарных станков.
| Метод управления электродвигателем | Диапазон регулирования скорости | Погрешность скорости, % | Время нарастания момента, мс | Пусковой момент | Цена | Стандартные применения | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Скалярный | 1:10 | 5-10 | Не доступно | Низкий | Очень низкая | Низкопроизводительные: насосы, вентиляторы, компрессоры, ОВК (отопление, вентиляция и кондиционирование) | |||||
| Векторный | Линейный | Полеориентированное управление | >1:200 | 1:200 | 1:200 | 1:200 |  E4-8400 E4-8400 |
||||
Общепромышленные векторные преобразователи частоты
Отличаются низкой ценой, широком функционалом и компактным дизайном, что наиболее полно соответствует сегодняшним потребностям.
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
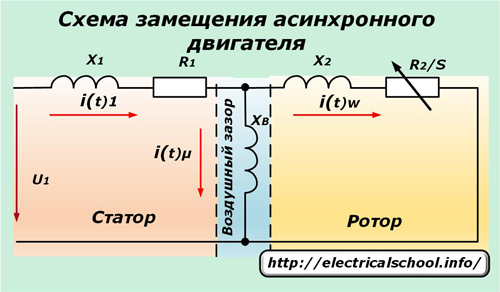
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
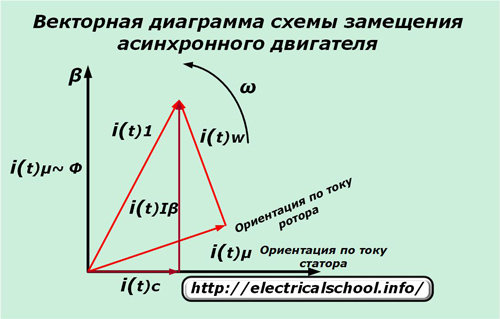
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
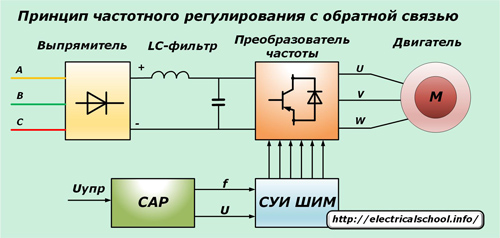
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
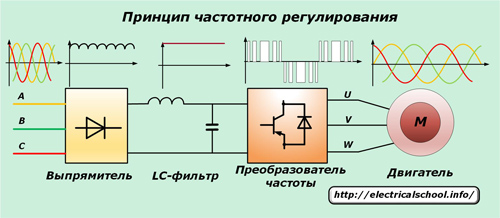
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
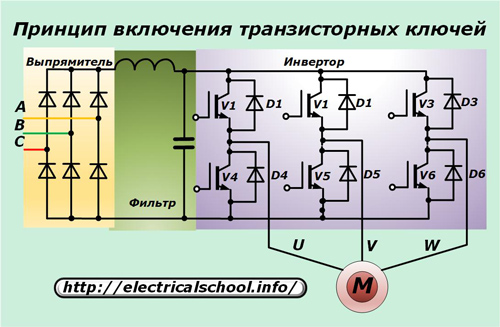
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
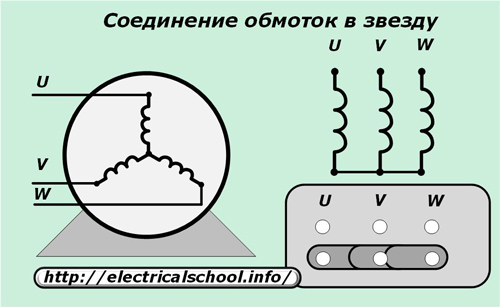
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
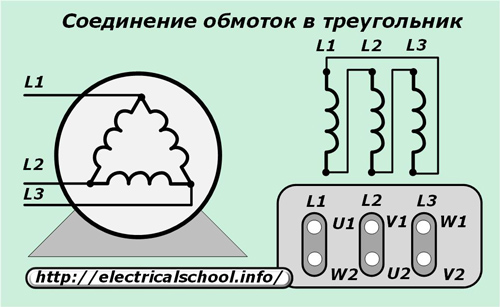
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
