
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, — регулируемой величиной.
Регулирование, при котором управление осуществляется различными устройвами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измериельного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автомашинным регулятором.
Система автоматического регулирования (рис. 1) представит собой совокупность отдельных элементов, направленно действующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением X.
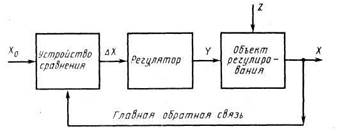 |
Рис. 1 Схема системы автоматического регулирования
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Регуляторы разделяются по следующим признакам.
1.. По способу действия: регуляторы прямого и непрямого (косвенного) действия. У регуляторов прямого действия регулирующий орган перемещается за счет энергии Самого объекта, воздействующего на чувствительный элемент. У регуляторов непрямого действия регулирующий орган перемещается за счет дополнительного источника энергии (электроэнергия, сжатый воздух, жидкость под давлением).
2. По роду действия: регулятор прерывистого (дискретного) и непрерывного действия.
В регуляторах непрерывного действия непрерывному изменению регулируемого параметра соответствует непрерывное перемещение регулирующего органа, между входной и выходной величинами существует непрерывная функциональная связь.
В регуляторах прерывистого действия непрерывной функциональной связи нет. Прерывистые системы можно разделить на две основное группы: релейные и импульсные.
Релейной системой автоматического регулирования называется такая система, которая в своем составе среди основных элементов имеет хотя бы один релейный элемент. Под релейным элементом подразумевается такой элемент системы, в котором непрерывному изменению входной величины соответствует скачкоообразное изме-
нение выходной величины, появляющейся лишь при вполне определенных значениях входной величины (электромагнитное реле).
Импульсной системой автоматического регулирования называется такая система, которая в своем составе имеет хотя бы один-импульсный элемент. Импульсный элемент преобразует непрерывное входное воздействие в ряд кратковременных импульсов,появ-ляющихся через определенные промежутки времени.
3. По роду энергии: электрические пневматические, гидравлические, электрогидравлические и электропневматические.
По закону регулирования:
а) пропорциональнее регуляторы, или П-регуляторы (статические);
б) интегральные регуляторы или И-регуляторы (автоматические);
в) пропорционально – интегральные регуляторы, или ПИ-регуляторы (изодромные);
г) пропорционально-дифференциальные регуляторы, или ПД-регуляторы (пропорциональные регуляторы с предварением);
д) пропорционально — интегрально-дифференциальные регуляторы, или
ПИД-регуляторы (изодромные регуляторы с предварением);
По назначению: регуляторы температуры, давления, расхода и т. д.
В зависимости от выполняемой функции: регуляторы соотношения, программные, самонастраивающиеся" стабилизирующие.
8. Регулятор температуры прямого действия. Регулятор, у которого регулирующий орган перемещается за счет энергий самого объекта, воздействующего на чувствительный элемент, называется регулятором прямого действия. Системы регулирования, использующие регуляторы прямого действия, называются системами прямого регулирования.
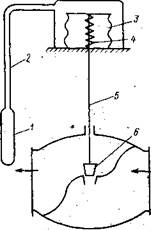
Рассмотрим работу регулятора температуры прямого действия типа РПД (рис. 1. Этот регулятор состоит из термометрической системы и клапана.
Термометрическая система регулятора представляет собой паровой манометрический термометр, в состав которого входят термобаллон 1, капилляр 2 и сильфон 3. Термометрическая система частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулируемой температуры.
При погружении термобаллона в измеряемую среду в термометрической системе устанавливается давление паров рабочей жидкости, величина которого соответствует температуре измеряемой среды. Давление, возникающее в термобаллоне, передается через пар рабочей жидкости по капилляру к сильфону. В сильфоне развивается усилие, пропорциональное его эффективной площади; это усилие уравновешивается усилием пружины 4. Если температура регулируемой среды выше заданного значения, то усилие, развиваемое сильфоном 5, больше усилия пружины 4, вследствие чего сильфон сжимается и при помощи штока 5 перемещает золотник 6 регулирующего клапана вниз. При этом проходное сечение клапана и количество нагревающего вещества, проходящего через клапан, уменьшаются; в результате температура среды понижается и достигает заданного значения. При понижении температуры регулируемой среды сильфон растягивается и клапан приоткрывается, увеличивая подачу нагревающего вещества, вследствие чего температура повышается до заданного значения.
| Рис. 1 Регулятор температуры прямого действия |
Регуляторы, которые воздействуют на регулирующий орган через усилительное устройство и исполнительный механизм, питаемый от внешнего источника энергии, называются регуляторами непрямого действия.
В регуляторе непрямого действия при изменении регулируемой величины усилие или энергия, возникающие в чувствительном элементе, приводят в действие впомогательное устройство, перемещающее регулирующий орган за счет энергии постороннего источника (электрического тока, жидкости под давлением, сжатого воздуха).
Системы регулирования, использующие регуляторы непрямого действия, называются ‘системами непрямого регулирования.
На рис. 1 приведена схема непрямого регулирования уровня жидкости в сосуде. Измерительное устройство (поплавок 1) при помощи рычагов связано с подвижным электрическим контактом.2. Подвижный контакт может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнется подвижный контакт, электродвигатель 3 вращается в ту или другую сторону. Через червячный редуктор и систему рычагов электродвигатель открывает или закрывает регулирующий орган — клапан 4, установленный на линии подвода жидкости Q1 в бак.
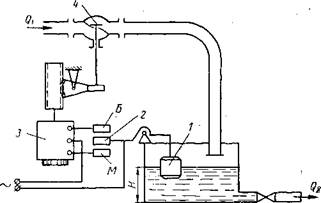 Если расход жидкости Q2 из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1 опустится. При этом подвижный контакт 2 коснется верхнего неподвижного контакта Б, электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4, тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я подвижный контакт 2 не установится между неподвижными контактами Б и М, в результате чего цепь двигателя будет отключена.
Если расход жидкости Q2 из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1 опустится. При этом подвижный контакт 2 коснется верхнего неподвижного контакта Б, электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4, тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я подвижный контакт 2 не установится между неподвижными контактами Б и М, в результате чего цепь двигателя будет отключена.
В описанном регуляторе непрямого действия перемещение регулирующего органа — клапана — производится электрическим исполнительным механизмом, использующим энергию от внешнего источника.
Регуляторы непрямого действия обладают высокой чувствительностью, развивают большое усилие и позволяют осуществить дистанционное управление регулирующим органом.
| Рис. 1 Регулятор уровня непрямого действия |
| | | следующая лекция ==> |
| Риск — вероятность реализации негативного воздействия (воздействие опасности) за определенный период времени (например, за год). | | |
Дата добавления: 2016-12-31 ; просмотров: 3126 | Нарушение авторских прав
Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
величина и знак отклонения управляемого параметра от заданного значения (рассогласование) Δφ = φ-φ
производная (скорость рассогласования по времени)  ,
,
интеграл величины рассогласования во времени  .
.
В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
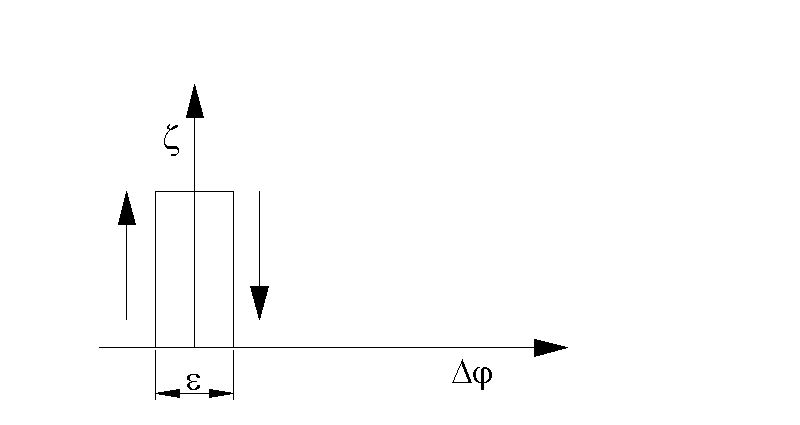
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
где kp– коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:

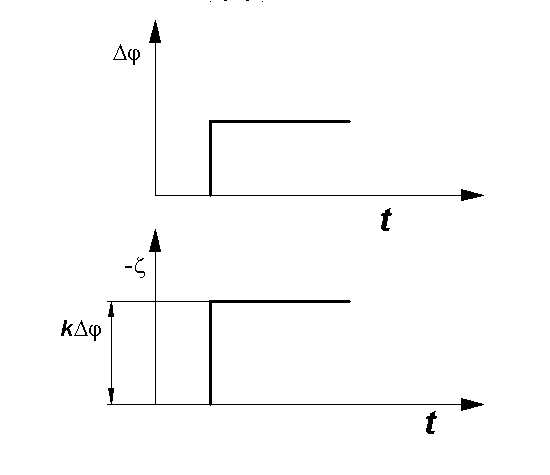
Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
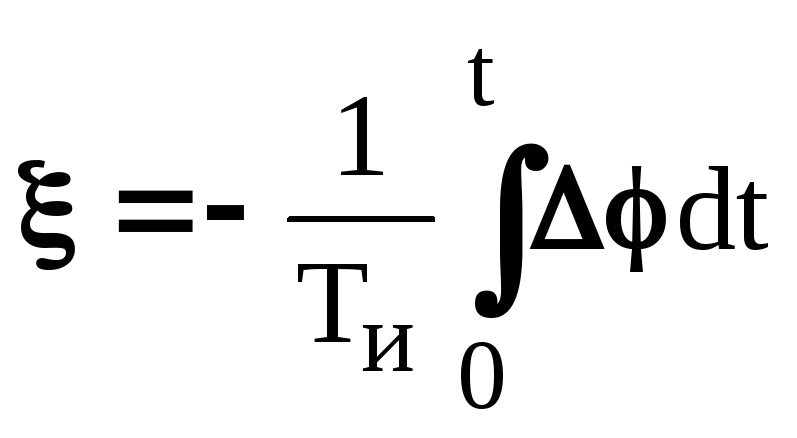 ,
,
где Ти– время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:
где Тд– время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:
Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
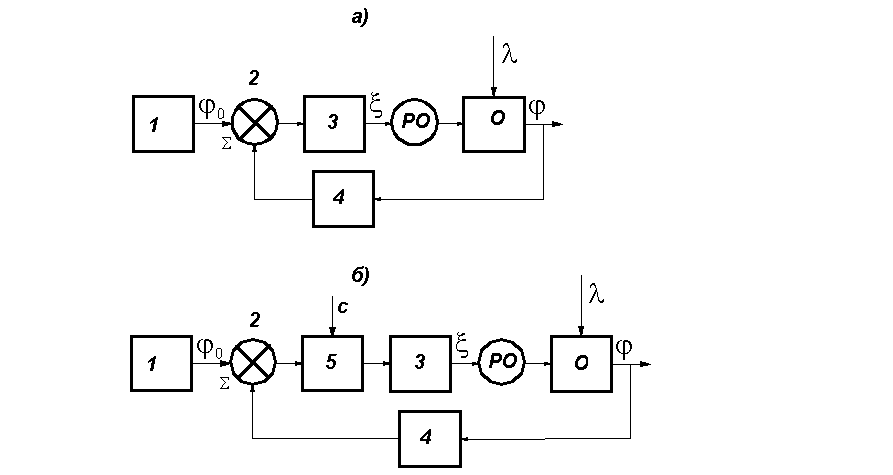
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О — объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.
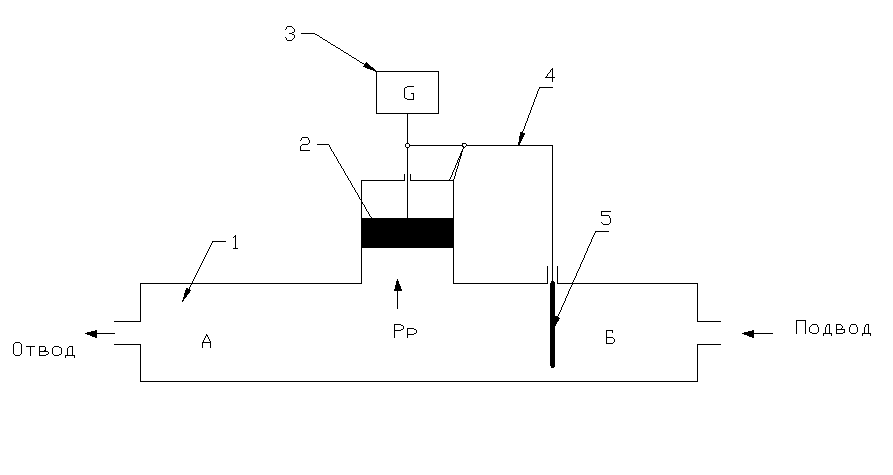
Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган )
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Рри уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Рр, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.
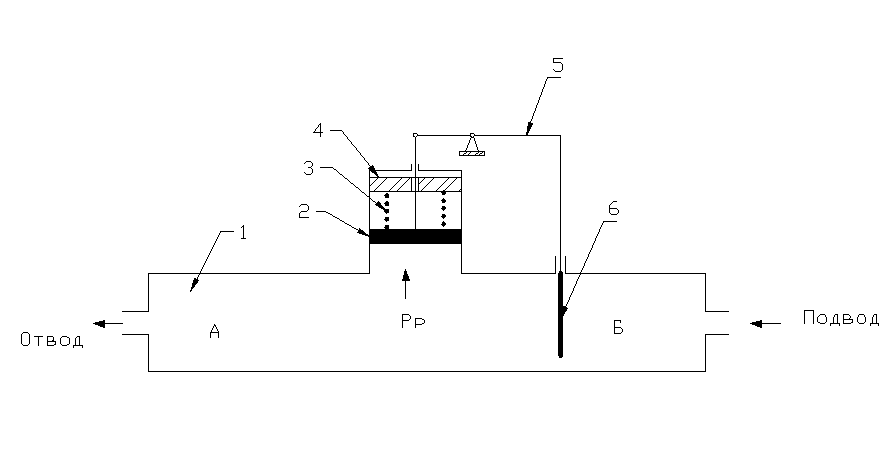
Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 — передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган )
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.
Для классификации регуляторов используется ряд параметров. Рассмотрим их детально.
В системах автоматического регулирования наиболее распространенными являются П регулятор, ПИ регулятор, ПИД регулятор, позиционный регулятор. Часто отдельно выделяют ШИМ регуляторы, но это ПДД регулятор, выход которого преобразуется в один или два дискретных сигнала с помощью широтноимпульсной модуляции. Кроме того, сейчас появляется все больше регуляторов, реализующих законы управления на базе нечеткой логики нечеткий регулятор.
Объект управления (ОУ) или объект регулирования — устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями.
Управление — формирование управляющих воздействий по определенному закону, обеспечивающих требуемый режим работы ОУ.
Автоматическое управление — управление, осуществляемое без непосредственного участия человека.
Задача регулирования — доведение выходной величины объекта регулирования до заранее определенного значения и удержания ее на данном значении с учетом влияния возмущающих воздействий.
Система автоматического регулирования (САР) — автоматическая система с замкнутой цепью воздействия (см. рис Структурная схема простейшей системы регулирования), в котором управление Y вырабатывается в результате сравнения истинного значения (PV=X) с заданным значением SP. Основное назначение САР заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону.
Выходное воздействие (Y) — воздействие, выдаваемое на выходе системы управления или устройства регулирования. В литературе по автоматизации также встречаются аббревиатуры, соответствующие данному определению:
Задающее воздействие — воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
Возмущающее воздействие — воздействие, стремящееся нарушить функциональную связь между задающим воздействием и регулируемой величиной.
Обрамтная связь — это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры, от которых зависит функционирование этой системы. Другими словами, на вход системы подаётся сигнал, пропорциональный её выходному сигналу (или, в общем случае, являющийся функцией этого сигнала). Часто это делается преднамеренно, чтобы повлиять на динамику функционирования системы.
Различают положительную и отрицательную обратную связь. Отрицательная обратная связь изменяет входной сигнал таким образом, чтобы противодействовать изменению выходного сигнала. Это делает систему более устойчивой к случайному изменению параметров. Положительная обратная связь, наоборот, усиливает изменение выходного сигнала. Системы с сильной положительной обратной связью проявляют тенденцию к неустойчивости, в них могут возникать незатухающие колебания, т.е. система становится генератором.
Регулятор — в теории управления устройство, которое следит за работой объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления (непосредственно, либо с помощью наблюдателей) и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления.
