
Экономия энергии и точное управление системами являются основными причинами применения преобразователей частоты в системах отопления, вентиляции и кондиционирования воздуха HVAC (Отопление, Вентиляция и Кондиционирование). Экономия энергии важна, так как небольшое уменьшение оборотов вентилятора или центробежного насоса имеет очень большое влияние на потребление им энергии.
КПД вентиляторов или насосов вместе с преобразователем частоты остается высоким на пониженных оборотах. КПД двигателя, однако, падает, поскольку двигатель становится недозагруженным. Изготовители преобразователей частоты предприняли попытки улучшить КПД двигателей на малых оборотах, используя ряд конструктивных решений. К сожалению, большинство из этих решений требует кропотливой ручной регулировки и все еще не может оптимизировать КПД двигателя во всех условиях.
Преобразователь частоты VLT HVAC Drive имеет уникальную функцию управления, называемую автоматической оптимизацией энергопотребления AEO (Automatic Energy Optimization). Благодаря этой функции преобразователь частоты автоматически увеличивает КПД двигателя до максимума в любых условиях работы.
Ниже рассматривается причина уменьшенного КПД двигателя при малых нагрузках и способ, которым функция AEO противодействует этой естественной тенденции. Рассматриваются также применение и ограничения данной функции.
Работа двигателя
В асинхронных электродвигателях переменного тока крутящий момент на валу двигателя создается магнитным полем внутри двигателя. Напряженность этого магнитного поля и возникающий в результате крутящий момент меняются вместе с требованием по нагрузке на двигателе. Более высокая нагрузка требует более высокого крутящего момента, что означает, что двигатель потребляет больше тока из линии питания. Хотя обороты двигателя остаются относительно постоянными, потребляемый ток может меняться существенно.
Если полный крутящий момент двигателя не требуется, то не требуется и полное магнитное поле. Ток, который создает чрезмерное магнитное поле, не дает положительного эффекта и генерирует реактивный ток, который тратит энергию и создает тепловое напряжение. Избыточный ток даже более очевиден на малом крутящем моменте, когда реактивный ток растет по сравнению с действительной составляющей тока. Это основная причина, почему малонагруженные двигатели демонстрируют низкий КПД, что и будет обсуждаться ниже более подробно.
Чтобы ограничить ток через двигатель, ограничивается подаваемое на двигатель напряжение. Хотя это и кажется простым, в действительности это не так. Слишком уменьшенное напряжение приводит к чрезмерному скольжению ротора двигателя, которое в свою очередь приводит к большому потреблению тока. Тепло, создаваемое этим током, может серьезно повредить двигатель. Поскольку слишком сильное неконтролируемое снижение напряжения может повредить двигатель, большинство изготовителей преобразователей частоты избегают уменьшения напряжения двигателя до оптимального уровня.
Зависимость напряжения от частоты
Для двигателей с нагрузками с постоянным крутящим моментом ток намагничивания двигателя должен оставаться постоянным во всем диапазоне управляемых преобразователем частоты оборотов. Поскольку индуктивное сопротивление (XL) обмоток статора двигателя пропорционально прилагаемой частоте, (XL = 2πfL), для поддержания постоянного тока двигателя требуется прямая зависимость между прилагаемым напряжением и частотой. Это прямая зависимость «напряжения от частоты» (U/F), является одним из способов управления двигателем при помощи преобразователя частоты.
Это относится к преобразователям частоты, которые рассчитаны на нагрузки при постоянном крутящем моменте, такие как конвейеры, лебедки и подобные промышленные установки. Постоянное значение В/Гц показано на Рисунке 1.

Когда преобразователь частоты с постоянной характеристикой U/f применяется при нагрузке с переменным крутящим моментом, полный ток намагничивания на малых оборотах больше, чем требуется самой нагрузкой. Это перенамагничивание, как было упомянуто, создает в двигателе избыточное тепло.
Решение заключается в определении, какое напряжение требуется двигателю для правильной работы. Поскольку для этого требуются специальные функции, некоторые изготовители преобразователей частоты просто игнорируют этот вопрос и их преобразователи частоты производят только постоянную характеристику U/f во всем диапазоне оборотов. Хотя такой подход не максимизирует КПД двигателя, он позволяет избежать перенамагничивания двигателя и образования чрезмерного скольжения ротора двигателя.

Поскольку нагрузки, требующие переменного крутящего момента, представляют собой совершенно другое, модель фиксированной характеристики U/f не будет работать для всех нагрузок. Когда производится попытка улучшить КПД двигателя, реальная настройка профиля U/f часто предоставляется конечному пользователю. При этом методе (представленном на Рисунке 2) от пользователя требуется определить промежуточную точку U/f в профиле преобразователя частоты. Для этого требуется большое количество экспериментов и оценок во всем диапазоне оборотов и нагрузки системы. Кроме того, если характеристики системы меняются, требуется повторить весь этот процесс настройки. Очевидно, что это не самое практичное решение.
Некоторые изготовители преобразователей частоты предлагают пользователю выбор из ряда предварительно заданных переменных профилей U/f. Хотя это и упрощает процедуру, все еще требуется вручную прогнать двигатель через весь диапазон оборотов и определить самый низкий профиль В/Гц, который будет воспринимать нагрузку без чрезмерного скольжения ротора двигателя или нагрева двигателя.
Характеристики нагрузки установки могут измениться из-за сезонных изменений или модернизации системы HVAC здания. В этом случае повторно должен быть осуществлен процесс ручной настройки. Из-за необходимости такой работы большинство пользователей просто выбирают высокий профиль U/f, зная, что это позволит справляться с нагрузкой. Это приводит к растрате дорогой энергии.
Функция автоматической оптимизации потребления энергии «Automatic Energy Optimization»
Лучшим решением для настройки напряжения в соответствии с кривой частоты/мощности стала бы ее автоматизация. Это именно то, что делает преобразователь частоты VLT HVAC Drive. Он использует уникальный процесс автоматической оптимизации энергопотребления «Automatic Energy Optimization», который без вмешательства пользователя автоматически гарантирует, что соотношение напряжения и частоты всегда оптимально для конкретной нагрузки двигателя.
Чтобы автоматически обеспечить правильное напряжение при любой рабочей частоте и нагрузке, преобразователь частоты непрерывно контролирует двигатель и реагирует на изменения. Уникальный процесс управленияVVC+ преобразователя частоты VLT HVAC Drive является основной частью. Ток контролируется таким образом, чтобы в любой момент можно было узнать показатели как активного тока (который меняется от нагрузки), так и реактивного тока (который намагничивает статор двигателя).
В результате, преобразователь частоты автоматически поддерживает максимальный КПД двигателя во всех условиях. Во время начального разгона подается до 110% выходного напряжения, чтобы обеспечить дополнительный крутящий момент на преодоление инерции нагрузки. Это также обеспечивает мягкий старт и плавное наращивание характеристик регулируемых преобразователей частоты, предназначенных для использования в системах HVAC. После того, как двигатель набирает заданные обороты, преобразователь частоты VLT HVAC Drive автоматически определяет уровень постоянной нагрузки и уменьшает выходное напряжение для максимизации КПД двигателя. Если нагрузка меняется, например, когда резко открывается клапан в системе накачки, частотный преобразователь определяет изменение нагрузки и немедленно увеличивает выходное напряжение, чтобы поддерживать управление двигателем.
Кроме того, функция Автоматической адаптации двигателя «Automatic Motor Adaptation (AMA)» преобразователя частоты VLT HVAC, которая точно определяет критические параметры двигателя, позволяет частотному преобразователю рассчитывать показатели тока, чтобы определить количество тока намагничивания, необходимого для конкретной нагрузки. В результате получаются исключительные характеристики двигателя при низкой нагрузке, в области, в которой большинство преобразователей частоты практически неэффективны. Преобразователь частотыVLT HVAC Drive может реально понизить реактивную часть тока двигателя. Этот компонент, часто составляющий 25% тока двигателя и больше при малой нагрузке, обычно игнорируется другими изготовителями преобразователей частоты.
Функция автоматической оптимизации энергопотребления «Automatic energy optimization (AEO)» позволяет преобразователю частоты VLT HVAC Drive управлять напряжением в широком диапазоне, чтобы настраивать выход частотного преобразователя на конкретную нагрузку. Диапазон напряжений, в котором работает функция AEO, представлен на Рисунке 3. Как видно, функция AEO позволяет преобразователю частоты в целях экономии энергии уменьшать напряжение на двигателе практически на 50%. Переменная характеристика U/f экономит еще 5% энергии в типовых установках HVAC.
Преимущества функции AEO
Основное преимущество применения функции автоматической оптимизации энергопотребления проявляется при нагрузках при переменном крутящем моменте. Поскольку обороты двигателя падают, нагрузка на двигатель существенно снижается. Если на двигатель подается постоянно соотношение U/f, это отрицательно влияет на КПД двигателя. Определить, насколько можно снизить напряжение на двигателе до того, как начнут снижаться характеристики двигателя, вручную довольно затруднительно. Функция AEO рассчитывает это автоматически и непрерывно. Если меняется профиль нагрузки, функция AEO реагирует на это изменение и настраивает напряжение, подаваемое на двигатель.
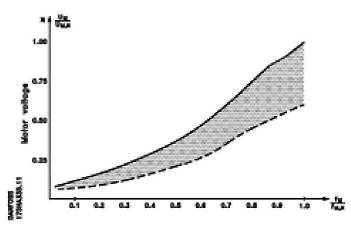
Рисунок 3. Рабочий диапазон функции AEO и экономия при использовании данной функции.
Даже без изменения оборотов функция AEO все еще экономит энергию. Чтобы обеспечить запас надежности функционирования и застраховать от проектных ошибок, большинство двигателей для систем HVAC имеют больший размер, чем требуется для работы с конкретной нагрузкой.
В результате, даже на полных оборотах, в условиях полного потока двигатель работает при неполной нагрузке. Без уменьшения напряжения, обеспечиваемого функцией AEO, двигатель работает неэффективно. С частотным преобразователем VLT HVAC Drive обычно следует отметить выходное напряжение с преобразователя частоты, которое меньше номинального значения, указанного на табличке с названием и номинальными данными двигателя, даже когда преобразователь частоты выдает полную частоту. Это скорее получаемая от функции AEO экономия, компенсирующая использование переразмеренного под конкретное применение двигателя, чем индикация неправильного состояния.
От применения функции AEO выигрывают также установки с переменными оборотами и постоянным объемом. Примером таких установок служит система вентилятора для чистой комнаты. В этом случае целью преобразователя частоты является поддержание постоянного потока воздуха, даже когда микрофильтр воздуха становится грязным. По мере того, как фильтр засоряется, частотный преобразователь автоматически увеличивает обороты вентилятора. ФункцияAEO гарантирует, что на валу двигателя всегда имеется достаточный крутящий момент, при этом поддерживается максимальный КПД двигателя.
Хотя максимизация КПД двигателя является основной целью функции AEO, имеются также и другие выгоды от ее применения. Тепловыделение в двигателе, основная причина отказа двигателей, сокращается. За счет уменьшения тепловых нагрузок в двигателе увеличивается срок службы двигателя. Уменьшенное выделение тепла в двигателе уменьшает также тепловую нагрузку от двигателя на окружающие элементы здания. В случаях установки больших двигателей в зонах с контролируемой температурой дополнительная экономия на затратах на охлаждение может быть существенной.
Уменьшенный ток также имеет дополнительную выгоду. Это отражается в снижении потерь энергии в преобразователе частоты и во всех других компонентах, подающих ток в двигатель, таких как трансформаторы или реакторы в линиях.
Работа нескольких двигателей
В установках, где имеется несколько работающих двигателей, но только один из них в каждый момент времени контролируется преобразователем частоты, таких как чередующиеся насосы, функция AEO будет максимизировать КПД того двигателя, который в данный момент работает. Метод динамического управления функции AEO автоматически реагирует на включенный двигатель и подает ток в соответствии с нагрузкой двигателя.
Поскольку функция AEO подстраивает выходное напряжение преобразователя частоты на конкретные требования конкретного двигателя, она не может работать надежно в установках с несколькими одновременно работающими двигателями. Если два или более двигателя одновременно подключаются к выходу регулируемого преобразователя частоты, функция AEO может только обеспечить выходное напряжение, которое корректно для среднего значения двигателей. В результате подаваемое на двигатели напряжение может оказаться слишком высоким для одного из двигателей и слишком низким для другого. Из-за проблем с возможным недонамагничиванием двигателя, этого следует избегать. Когда несколько двигателей одновременно управляются одним частотным преобразователем частоты, VLT HVAC Drive настраивается на предварительно запрограммированную кривую В/Гц для переменного крутящего момента.
Выводы
Двигатели в системах HVAC редко нагружаются полностью. Это связано с тем, что двигатели для конкретной установки обычно переразмерены, и потому, что нагрузка двигателя резко падает, когда уменьшается расход. Обычно на малых оборотах КПД двигателя небольшой.
Для улучшения КПД двигателя некоторые преобразователи частоты требуют наличия оператора системы, который регулирует выходные характеристики В/Гц. Эти ручные методы как обременительны, так и неточны. В результате, они используются редко. Кроме того, если изменяются требования к системе, оператор вынужден повторять настройки.
Уникальный алгоритм VVC+ частотного преобразователя VLT HVAC Drive детально контролирует потребности двигателя в токе. За счет этого регулируемый преобразователь частоты определяет нагрузку на двигатель, а функция автоматической оптимизации энергопотребления гарантирует, что двигатель в течение всего времени получает идеальное напряжение. Все это выполняется автоматически без необходимости вмешательства пользователя.
 Частота электрического тока выступает одним из параметров качества электроэнергии и основной характеристикой режима энергосистемы. Количественно частота в энергосети равна количеству периодов в секунду. Изменение частоты в сети влияет на функционирование и, соответственно, производительность работы потребителей. Также свое влияние оказывает отклонение частоты на работу всей энергосистемы.
Частота электрического тока выступает одним из параметров качества электроэнергии и основной характеристикой режима энергосистемы. Количественно частота в энергосети равна количеству периодов в секунду. Изменение частоты в сети влияет на функционирование и, соответственно, производительность работы потребителей. Также свое влияние оказывает отклонение частоты на работу всей энергосистемы.
Нормируемые требования к показателям
В РФ требования к качеству работы энергосистемы стандартизированы.
В соответствии с ГОСТ 13109-97 частота в энергосистеме должна непрерывно поддерживаться на уровне f = 50 ± 0,2 Гц, при этом допускается кратковременное отклонение частоты до значения ∆f = 0,4 Гц.
Анализируя зависимость силы тока от частоты, можно сделать вывод, что если подключаемая нагрузка имеет чисто активный характер (к примеру, резистор), то в широком диапазоне сила тока от частоты иметь зависимость не будет. В случае достаточно высоких частот, когда индуктивность и ёмкость подключаемой нагрузки будут характеризоваться сопротивлением, сравнимым с активным, то сила тока будет иметь определенную зависимость от частоты.
Другими словами, при варьировании частоты тока происходит изменение ёмкостного сопротивления, изменение которого, в свою очередь, приводит к изменению тока, протекающего по цепи.
То есть при повышении частоты, снижается ёмкостное сопротивление, и повышается ток, протекающий по цепи.
Математическое выражение зависимости будет иметь следующий вид: I = UCω;
Зависимость при учете активного сопротивления будет определяться следующим выражением: I (ω) = UCω √(R2 • C2 • ω2 + 1).
Влияние частоты тока на электроприборы
Далее рассмотрим влияние частоты электрического тока. Увеличение частоты до сравнительно невысоких величин (1 — 10 тыс. Гц), обычно является следствием исключительно повышения номинальной мощности электроаппаратуры, поскольку таким образом возрастает проводимость газовых промежутков. Для измерения частоты в системе используют частотомеры.
Паровая турбина разрабатываются и создаются таким образом, чтобы при номинальной скорости вращения (частоте) обеспечивалась максимальная выходная мощность на валу. При этом уменьшение номинальной частоты является следствием возникновения потерь на удар пара о лопатки с единовременным повышением момента вращения, а повышение частоты — к снижению момента вращения.
Таким образом, наиболее экономичный режим работы достигается при оптимальной частоте.
Помимо этого, работа на пониженных частотах приводит к ускоренному износу рабочих лопаток и прочих частей и механизмов. Снижение частоты оказывает влияние на расход на собственные нужды станций.
Коэффициент полезного действия электродвигателя
где p ∑ – суммарные потери мощности; P 1 – потребляемая асинхронным двигателем (его статорной обмоткой) активная электрическая мощность; P 2 – полезная механическая мощность (снимаемая с вала двигателя).
КПД современных асинхронных двигателей при номинальной нагрузке для машин мощностью свыше 100 кВт составляет 0,92 − 0,96, мощностью 1 − 100 кВт – 0,7 − 0,9, а микромашин – 0,4 − 0,6 (большие значения относятся к машинам большей мощности).
Так же, как в трансформаторе, потери мощности асинхронного двигателя следует разделить на потери постоянные и переменные (или потери холостого хода и короткого замыкания). Постоянные потери не зависят от нагрузки. Это потери магнитные, механические, электрические холостого хода.
Магнитные потери определяются аналогично магнитным потерям трансформатора с помощью формулы Штейнметца:
где p 1,0/50 – удельные потери в стали на единицу массы при частоте 50 Гц и индукции 1,0 Тл; B – индукция на участке магнитопровода; G c – масса
сердечника (магнитопровода) или его участка.
Частота перемагничивания в роторе f 2 = f 1 s в рабочем режиме двигателя существенно меньше частоты магнитной индукции в статоре; масса магнитопровода ротора также меньше аналогичной массы статора. Обычно в практических расчетах асинхронных двигателей общепромышленного применения пренебрегают магнитными потерями в роторе.
Механические потери p мх состоят из потерь в подшипниках p подш , потерь на трение щеток о кольца p тр.щ (только для фазного ротора), вентиля-

5. Асинхронные машины
ционных потерь p вент , включающих в себя потери на трение частей машины о воздух и потери в крыльчатке вентилятора, установленной на валу машины:
р мх = р подш + р вент + р тр.щ .
Механические потери зависят только от частоты вращения и составляют не более 2 % от номинальной мощности машины. Поскольку частота вращения асинхронного двигателя при изменении нагрузки от нуля до номинальной изменяется мало, то механические потери считают постоянными.
В отличие от трансформатора в асинхронном двигателе учитывают электрические потери холостого хода, поскольку ток холостого хода в нем существенно больше, чем в трансформаторе, и составляет от 20 до 50 % от номинального тока (причины такого значения I 0 объяснены в п. 5.1):
Таким образом, потери холостого хода
р 0 = р мх + р мг + р эл0 .
К потерям переменным (короткого замыкания) относят электрические потери в обмотках статора и ротора:
р эл 1 = m 1 r 1 I 1 2 ; р эл 2 = m 1 r 2 ′ ( I 2 ′ ) 2 .
К переменным потерям относят и добавочные потери, вызванные различными причинами: неравномерностью зазора, технологическими погрешностями, вытеснением тока в проводниках обмотки, пульсациями магнитного потока и т. д. Обычно эти потери рассчитывают как определенный процент от номинальной мощности по формуле (5.73).
Итак, переменные потери, как следует из формул (5.120), (5.73), зависят от второй степени тока или второй степени коэффициента нагрузки k нг = I / I н (отношения тока текущей нагрузки к номинальному его значению):
p к = p эл2 + p д = m 1 r к ( I 2 ′ ) 2 + ( I I н ) 2 p д = k нг 2 р кн ,
где p кн – потери короткого замыкания при номинальном токе.
Таким образом, суммарные потери мощности можно представить в следующем виде:
p Σ = p 0 + p к = p 0 + k нг 2 p кн .
5. Асинхронные машины
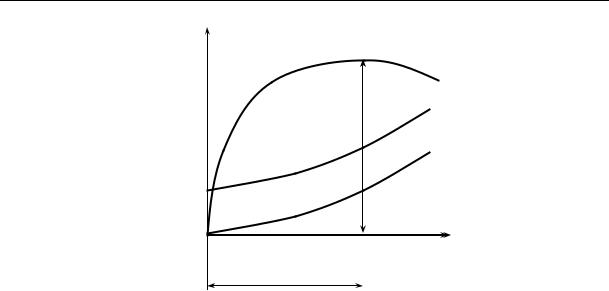
Рис. 5.23. Зависимость КПД двигателя и его потерь от коэффициента нагрузки
Формулу (5.115) запишем с учетом выражения (5.122):
Характер зависимости КПД от коэффициента нагрузки такой же, как
и у трансформатора. При увеличении нагрузки КПД возрастает за счет уве-
личения Р 2 , но одновременно быстрее, чем Р 2 , возрастают переменные потери р к , поэтому при некотором токе I кр рост КПД прекращается и в дальнейшем начинает уменьшаться (рис. 5.23). Если исследовать функцию
(5.123) на экстремум (взять производную dη/d k нг и приравнять ее к нулю), то получим условие максимума КПД: он наступает при равенстве переменных
и постоянных потерь р к = р 0 . При проектировании электрической машины стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько мень-
шей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60 − 80 % от номинальной (коэффициент нагрузки k нг = 0,6 − 0,8). На рис. 5.23 приведены зависимости изменения КПД и потерь мощности от коэффициента нагрузки.
Коэффициент мощности асинхронной машины определяют как отношение активного тока к полному току или активной потребляемой мощности к полной мощности по выражению

5. Асинхронные машины
Рис. 5.24. Характеристика
Рис. 5.25. Зависимости тока
роторной обмотки и cos ψ 2
Асинхронный двигатель, так же как и трансформатор, независимо от нагрузки потребляет из сети отстающий ток, поэтому его cos φ 1 всегда меньше единицы.
При холостом ходе асинхронного двигателя коэффициент мощности мал и составляет cos φ 0 = 0,08 − 0,15 (рис. 5.24). Это объясняется малой величиной активной составляющей тока, идущего на покрытие лишь достаточно небольших потерь активной мощности. В то же время реактивная составляющая тока холостого хода сравнительно велика, поскольку потребляется двигателем для создания основного магнитного потока, практически не зависящего от нагрузки. При увеличении нагрузки cos φ 1 сначала довольно быстро растет при увеличении момента на валу, затем рост его замедляется и достигает максимума при мощности, близкой к номинальной (рис. 5.24). Но при увеличении момента уменьшается частота вращения и растет скольжение. При этом увеличивается частота тока в роторе f 2 = f 1 s , его индуктивное сопротивление. Снижается и cos φ 1 , как правило, при нагрузках, выше номинальных.
Вследствие массового использования асинхронных двигателей для рационального электроснабжения предприятий следует так организовывать технологический процесс, чтобы асинхронные двигатели были загружены в соответствии сихноминальной мощностью инеработали нахолостомходу.
Величина коэффициента мощности для двигателей с короткозамкнутым ротором мощностью до 100 кВт достигает 0,7 − 0,9, а для двигателей свыше 100 кВт cos φ 1 = 0,9 − 0,95. В двигателях с фазным ротором cos φ 1 и КПД несколько ниже, что объясняется дополнительными потерями на трение щеток, худшим использованием объема ротора из-за наличия изоляции в его пазах и увеличением намагничивающего тока в результате уменьшения сечения зубцов ротора.
