
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
Лекция №1
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Теоретическая механика – это наука, изучающая математические методы расчёта механизмов и сооружений. Расчет ведется не самих реальных объектов, а их моделей. Применяют графический и аналитический методы расчета.
Графический метод –основан на геометрических построениях.
Аналитический метод –основан на алгебраических расчетах.
Статика – это раздел теоретической механики, который изучает равновесие абсолютно твердых тел под действием сил.
Абсолютно твердое тело – это недеформируемое тело, в котором расстояние между любыми двумя точками всегда остается неизменным и никакие внешние воздействия не вызывают изменения его размеров и формы.
Сила – это мера механического воздействия одного тела на другое. Сила измеряется в ньютонах(Н) и является векторной величиной, то есть характеризуется 1) численным значением (модулем);
2) точкой приложения;
В графическом методе расчета силу изображают в виде вектора, в каком либо масштабе.
Пример1.1. Начертить вектор силы F = 30 кН в масштабе 1:5.
 Решение. Составляем пропорцию:
Решение. Составляем пропорцию:
| 1см – 5 кН х см – 30 кН . |
Пример 1.2. Определить значение силы, если в масштабе 1:2 вектор имеет длину 3 см.
 Решение: составляем пропорцию:
Решение: составляем пропорцию:
| 1см – 2 кН 4 см – х кН . |
Силы бывают внешними и внутренними.
Внешние силы представляют собой действие одного тела на другое и
делятся на активные и реактивные.
Активные силы – стремятся вызвать перемещение тела (сила G, рис. 1.1).
Реактивные силы (реакции) – стремятся противодействовать перемещению тела под действием активных сил (сила R, рис. 1.1).
 Внутренние силы — возникают внутри тела под действием внешних сил.
Внутренние силы — возникают внутри тела под действием внешних сил.
Система сил— совокупность нескольких сил, приложенных к телу.
Плоская система сил — линии действия сил лежат в одной плоскости.
Пространственная система сил — линии действия сил лежат в разных плоскостях.
| Рис. 1.2 |
Сходящаяся система сил линии действия сил пересекаются в одной точке (рис. 1.2).
Эквивалентные системы сил – разные системы сил, которые оказывают одинаковое механическое действие на тело.
Равнодействующая сила — одна сила, эквивалентная данной системе сил.
Уравновешивающая сила — сила, равная по модулю данной силе и направленная по той же линии действия, но в противоположную сторону.
Уравновешенная система сил — система сил, приложенная к материальной точке под воздействием которой точка находится в состоянии покоя.
 Правило параллелограмма — равнодействующая (FΣ) двух сил (F1 и F2), приложенных к одной точке, является диагональю параллелограмма, построенного на данных силах/Вместо правила параллелограмма можно пользоваться правилом треугольника.
Правило параллелограмма — равнодействующая (FΣ) двух сил (F1 и F2), приложенных к одной точке, является диагональю параллелограмма, построенного на данных силах/Вместо правила параллелограмма можно пользоваться правилом треугольника.
Вопрос
Основные понятия и аксиомы статики
Материальной точкой называют тело, размерами которого можно пре-небречь. Она обладает массой и способностью взаимодействовать с другими материальными точками. Например, в небесной механике планеты, движущие-ся вокруг Солнца, часто рассматривают как материальные точки, поскольку их размеры малы по сравнению с размерами орбит. Пользоваться понятием мате-риальной точки целесообразно также и в том случае, когда все частицы движу-щегося физического тела перемещаются одинаково.
Совокупность материальных точек, положения и движения которых взаимосвязаны между собой, называется системой материальных точек.
В теоретической механике пренебрегают малыми деформациями тел и считают эти тела абсолютно твердыми.
Абсолютно твердым телом называется такое тело, расстояние между дву-мя точками которого, во все время движения, остается величиной постоянной.
Силой называется количественная мера механического взаимодействия тел. Сила является векторной величиной, действие силы на тело определяется численным значением (модулем), направлением и точкой приложения силы
(рис. 1.1).
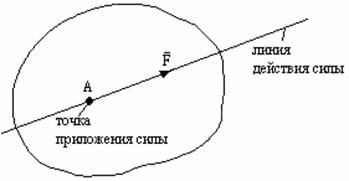
На схемах сила изображается направленным отрезком. Основной едини-цей измерения силы является 1 Ньютон (1Н).
— Совокупность нескольких сил, действующих на тело, называется систе-мой сил.
— Эквивалентные системы сил — системы сил, оказывающие одинаковое механическое действие на одно и то же тело.
— Уравновешенная система сил — система сил, под действием которой те-ло находится в равновесии.
— Сила, эквивалентная некоторой системе сил, называется равнодействующей.
— Сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону, называется уравновешивающей силой.
— Внешними силами называются силы, действующие на тело со стороны других тел.
— Внутренние силы — силы взаимодействия между частицами одного и то-го же тела.
В статике рассматриваются условия равновесия внешних сил.
Аксиомы статики.В основе статики лежат несколько не требующих до-казательства аксиом, из которых выводятся все теоремы и уравнения.
Аксиома 1. Две силы, действующие на абсолютно твердое тело уравновешива-ются только тогда, когда они равны по величине и направлены по од-ной прямой в противоположные стороны (рис. 1.2).
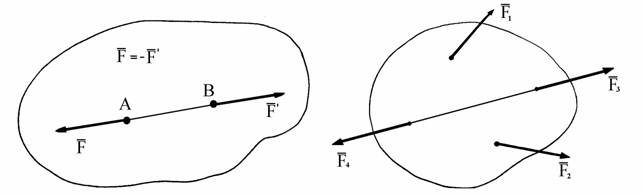
Рис. 1.2 Рис. 1.3Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изме-нится, если прибавить к ней или отнять от нее уравновешенную сис-тему сил
 (рис. 1.3).
(рис. 1.3).
Следствие из аксиомы 1 и 2. Действие силы на абсолютно твердое тело (АТТ) не изменится, если точку приложения этой силы перенести по ли-нии ее действия. Пусть на тело в точке А действует сила  (рис. 1.4). Добавим в точке В, выбранной произвольно на линии действия си-лы , уравновешенную систему сил
(рис. 1.4). Добавим в точке В, выбранной произвольно на линии действия си-лы , уравновешенную систему сил  и
и  равных по абсолютной величине и направленных по линии ее действия. На основании аксиомы 1 силы и будут уравновешены и их можно отбросить (аксиома 2). В результате получим силу = , но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.
равных по абсолютной величине и направленных по линии ее действия. На основании аксиомы 1 силы и будут уравновешены и их можно отбросить (аксиома 2). В результате получим силу = , но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.
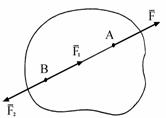
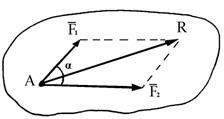
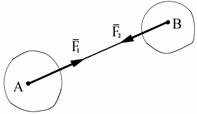
Рис. 1.4 Рис. 1.5 Рис. 1.6 Аксиома 3 Равнодействующая двух сил, приложенных к АТТ в одной точке, равна их геометрической сумме  , т.е. выражается по моду-лю и направлению диагональю параллелограмма,построенного на этих силах (рис. 1.5).
, т.е. выражается по моду-лю и направлению диагональю параллелограмма,построенного на этих силах (рис. 1.5).

Аксиома 4 Всякому действию одного тела на другое соответствует равное по величине, но противоположное по направлению противодействие. Действие и противодействие-это силы, приложенные к двум раз-личным телам, поэтому они не уравновешиваются (рис. 1.6). Аксиома 5 Если деформируемое тело под действием системы сил находится в равновесии, то при отвердевании его равновесие сохраняется. Под действием сил тело D находится в равновесии. Если трос CB заменить стержнем, то равновесие не нарушится, равновесие не нарушится и в том случае, если трос BD за-менить стержнем, если же стержень АВ заменить тросом — равновесие нарушится (рис. 1.7).
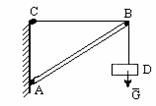
Рис.1.7
Связи и их реакции. Твердое тело называется свободным, если оно мо-жет перемещаться в пространстве в любом направлении (ВС в полете). Тело, ограничивающее свободу движения данного твердого тела, является по отно-шению к нему связью. Твердое тело, свобода движения которого ограничена связями, называетсянесвободным (движение самолета по ВПП). Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении, называется силой реакции этой связи. Для нахождения реакции связей используют аксиому связей, на основании ко-торой всякое несвободное тело можно рассматривать как свободное, если от-бросить связи, заменив их действие на тело силами реакций этих связей. Направление силы реакции связи противоположно тому направлению, в котором активные силы стремятся переместить тело.
Различают три группы связей:
1. Гибкие связи (трос, цепь, ремень, канат). Реакции связей направлены по оси связей (рис. 1.8). 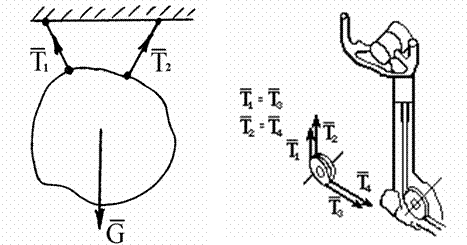
Рис. 1.8Если нить отклоняется роликом, в котором не учитывается трение, то натя-жение нити не изменяется. Например, натяжение тросов, идущих от штурвала к элеронам самолета, с обеих сторон равны по модулю |Т1|= |Т3|, |Т2|= |Т4| (рис. 1.8б). 2. Твердые, идеально гладкие связи. Реакция направлена по общей нор-мали к поверхностям соприкасающихся тел (рис. 1.9).
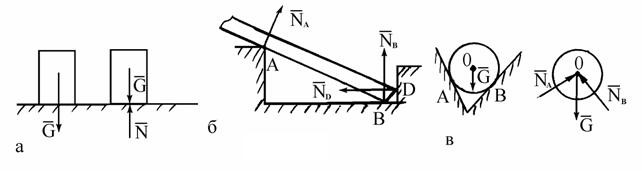
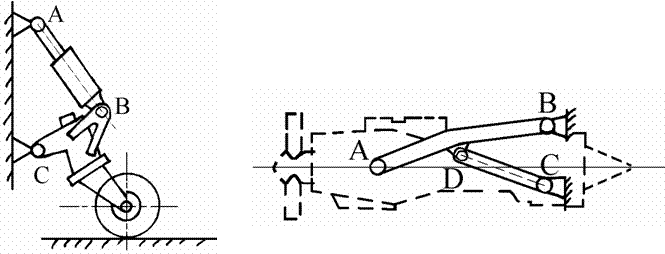
Рис. 1.93. Шарнирные связи. Шарниром в механике называется устройство, до-пускающее поворот одного телаотносительно другого, но ограничивающее при этом линейные перемещения этих тел. Шарнирами, например, являются соеди-нения А, В, С элементов задней опоры самолета (рис. 1.10), узлы А,В,С,D под-вески авиационного двигателя (рис. 1.11).
Реакция цилиндрического шарнира  может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от ве-личины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 1.12б, в).
может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от ве-личины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 1.12б, в). 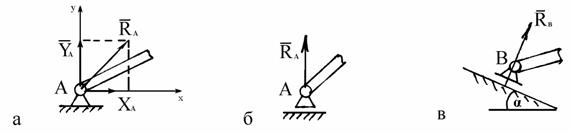
Рис. 1.12 Шаровой шарнир исключает любое перемещение тела во всех направле-ниях, кроме вращения, поэтому реакция шарового шарнира может иметь любое направление в пространстве. Чаще всего эту реакцию представляют в виде трех ее составляющих по осям координат x, y, z (рис. 1.13).
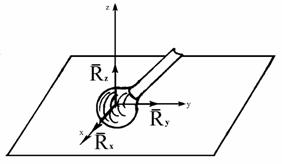
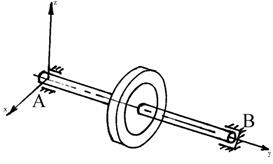
Рис. 1.13 Рис. 1.14 Разнообразные опорные устройства валов машин схематически представ-ляют подшипниками двух типов:радиальным (цилиндрическим — А), не пре-пятствующим некоторым осевым смещениям вала и радиально-упорным (В), исключающим осевые перемещения вала (рис. 1.14). Неподвижная защемляющая опора или жесткая заделка. На заделанный конец балки со стороны опоры действует система распределенных сил, кото-рую заменяем эквивалентной системой сосредоточенных сил  и моментом Ма, приложенных в точке А (рис. 1.15).
и моментом Ма, приложенных в точке А (рис. 1.15).
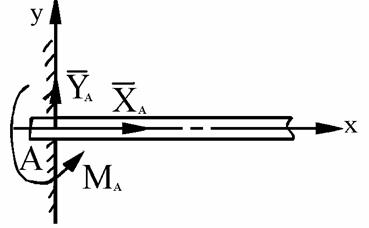
Рис. 1.15 2 Вопрос
Активные силы и реакции связей.
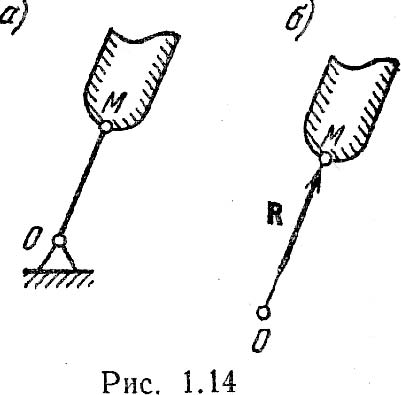
Тело назыв свободным, если его перемещения ничем не ограничены. Тело, перемещения которого ограничены другими телами, называется несвободным, а тела, ограничивающие перемещения данного тела,– связями.В точках контакта возникают силы взаимодействия между данным телом и связями. Силы, с которыми связи действуют на данное тело, называются реакциями связей.
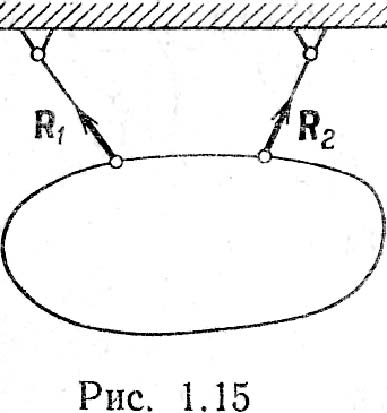
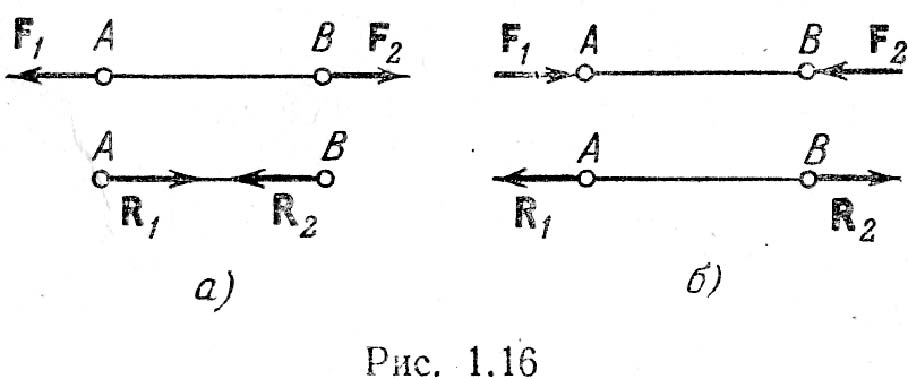
Принцип освобождаемоcти: всякое несвободное тело можно рассматривать как свободное, если действие связей заменить реакциями их, приложенными к данному телу.В статике полностью определить реакции связей можно с помощью условий или уравнений равновесия тела, которые будут установлены в дальнейшем, но направления их во многих случаях можно определить из рассмотрения свойств связей. В качестве простейшего примера на рис. 1.14, а представлено тело, точка М которого соединена с неподвижной точкой О при помощи стержня, весом которого можно пренебречь; концы стержня имеют шарниры, допускающие свободу вращения. В данном случае для тела связью служит стержень ОМ; стеснение свободы перемещения точки М выражается в том, что она вынуждена находиться на неизменном удалении от точки О. Сила действия на такой стержень должна быть направлена по прямой ОМ, и согласно аксиоме 4 сила противодействия стержня (реакция) R должна быть направлена вдоль той же прямой. Т. о., направление реакции стержня совпадает с прямой ОМ (рис. 1.14, б). Аналогично сила реакции гибкой нерастяжимой нити должна быть направлена вдоль нити. На рис. 1.15 показано тело, висящее на двух нитях, и реакции нитей R1 и R2. Силы, действующие на несвободное тело, делят на две категории. Одну категорию образуют силы, не зависящие от связей, а другую– реакции связей. При этом реакции связей носят пассивный характер– они возникают потому что на тело действуют силы первой категории. Силы, не зависящие от связей, называют активными, а реакции связей– пассивными силами. На рис. 1.16, а вверху показаны две равные по модулю активные силы F1 и F2, растягивающие стержень АВ, внизу показаны реакции R1 и R2 растянутого стержня. На рис. 1.16, б вверху показаны активные силы F1 и F2, сжимающие стержень, внизу показаны реакции R1 и R2сжатого стержня.
Виды опор
При решении плоской задачи считается, что всякий элемент имеет 3 степени свободы (3 возможных перемещения, однозначно определяющих положение тела в пространстве): вращение вокруг точки и 2 линейных перемещения вдоль 2-х осей).
Всякая реакция возникает в местах наложения связен.
Если наложено ограничение на одно из указанных выше перемещений (чаше всего перемещение полагается равным нулю), то в этом направлении возникает реакция опоры: сосредоточенная сила при ограничении линейного перемещения и пара сил при ограничении углового перемещения.
В зависимости от налагаемых ограничений на перемещение тела различают следующие виды опор:
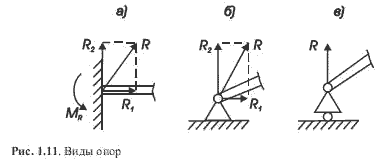
Заделка— нет перемещений (жесткое закрепление тела, например, сварка), возникают реакция неизвестной величины и направления R и реактивный момент MR.
Неизвестную реакцию удобно представить в виде ее проекций на оси координат любого направления, например, для плоской системы горизонтальное и вертикальное. Итого: в плоской заделке возникают 3 неизвестные реакции — 2
силы и одна пара сил (рис. 1.11, а);
Неподвижная шарнирная опора— возможно вращение вокруг опоры, линейных перемещений нет, поэтому возникает реакция неизвестной величины и направления R, которую заменяют ее проекциями на оси координат. Для плоской системы возникают 2 неизвестные реакции: R1 и R2(рис. 1.11, б).
Примером шарнирной опоры можно считать подшипниковую опору. Внутреннее кольцо шарикового или роликового подшипника может поворачиваться относительно наружного на угол 2°. Этого достаточно, чтобы считать подшипник шарнирной опорой.
Подвижная шарнирная опора— возможно вращение вокруг опоры и перемещение вдоль одной из осей, например, плавающая подшипниковая опора, возникает одна реакция R: сила в направлении ограничения движения (перпендикулярно направлению движения вдоль оси) (рис. 1.11, в).
Внешние силы
Внешняя сила — это мера взаимодействия между телами. В задачах сопротивления материалов внешние силы считаются всегда заданными. К внешним силам относятся также реакции опор (связей).
Внешние силы делятся на объемные и поверхностные. Объемные силы приложены к каждой частице тела по всему его объему. Примером объемных сил являются силы веса и силы инерции. Часто задают простой закон изменения этих сил по объему. Объемные силы определяются их интенсивностью, как предел отношения равнодействующей сил в рассматриваемом элементарном объеме к величине этого объема, стремящего к нулю:lim  V
V  0 F V и измеряются в Н/м 3 .
0 F V и измеряются в Н/м 3 .
Поверхностные силы делятся на сосредоточенные и распределенные.
Сосредоточенными считаются силы, приложенные к малой поверхности, размеры которой малы по сравнению с размерами тела. Однако при расчете напряжений вблизи зоны приложения силы нагрузку следует считать распределенной. К сосредоточенным нагрузкам относят не только сосредоточенные силы, но и пары сил, примером которых можно считать нагрузку, создаваемую гаечным ключом при закручивании гайки. Сосредоточенные усилия измеряются в кН.
Распределенные нагрузки бывают распределенными по длине и по площади . К распределенным нагрузкам относят давление жидкости, газа или другого тела. Распределенные силы измеряются, как правило, в кН/м(распределенные по длине) и кН/м 2 (распределенные по площади).
Все внешние нагрузки можно разделить на статические и динамические.
Статическими считаются нагрузки, в процессе приложения которых возникающие силы инерции малы и ими можно пренебречь.
Если силы инерции велики (к примеру – землетрясение) – нагрузки считаются динамическими. Примерами таких нагрузок также могут служить внезапно приложенные нагрузки, ударные и повторно-переменные.
Внезапно приложенные нагрузки передаются на сооружение сразу
полной своей величиной (к примеру давление колес локомотива, входящего на мост).
Ударные нагрузки возникают при быстром изменении скорости соприкасающихся элементов конструкции, например» при ударе бабы копра о сваю при ее забивке.
Повторно-переменные нагрузки действуют на элементы конструкции, повторяясь значительное число раз. Таковы, например, повторные давления пара, попеременно растягивающие и сжимающие шток поршня и шатун паровой машины. Во многих случаях нагрузка представляет собой комбинацию нескольких видов динамических воздействий.
Внутренние силы
В результате действия внешних сил в теле возникают внутренние силы.
Внутренняя сила — силы взаимодействия между частями одного тела, возникающие под действием внешних сил.
Внутренние силы являются самоуравновешенными, поэтому они не видны и не влияют на равновесие тела. Определяют внутренние силы методом сечения.
Внешние нагрузки приводят к следующим видам напряженно-деформированного состояния:
Активные и реактивные силыявляются внешними силами ( нагрузками), вызывающими деформацию изгиба в балке.
Принцип Даламбера формулируется так: активные и реактивные силы, действующие на материальную точку, вместе с силами инерции образуют систему взаимно уравновешенных сил, удовлетворяющую всем условиям равновесия.
Как было сказано выше, внешними нагрузками балки являютсяактивные и реактивные силыи моменты.
Решая задачу первым способом, мы учитывали только фактически действующие на телоактивные и реактивные силы и составили шесть всеобщих уравнений движения, связывающих проекции этих сил с массами и с проекциями ускорений частиц тела.
Для определения внутренних силовых факторов применим метод сечений, причем изображать балку будем только одной линией — осью, к которой приложеныактивные и реактивные силы.
Пусть всеактивные и реактивные силы и массы механизма приведены к одному из его звеньев.
Расчеты с учетом инерционных нагрузок ведутся известным из теоретической механики методом кинетостатики, основанном на принципе Даламбера. Согласно этому принципу всеактивные и реактивные силы, приложенные к телу, вместе с силами инерции образуют систему взаимно уравновешенных сил, удовлетворяющую всем условиям равновесия. Таким образом, задачи динамики и сопромата решаются методами статики.
Возможная работа — элементраная работа силы на возможном перемещении.
dA=Fdr — элементарная работа силы (F и r — векторы)

Если у какой-то связи  (RK тоже вектор), то связь называется идеальной.
(RK тоже вектор), то связь называется идеальной.
Если вся сумма  , то механическая система с идеальными связями.
, то механическая система с идеальными связями.
Примеры идеальных связей: внутренние связи в абсолютно твердых телах; абсолютно гладкие поверхности; шарниры без трения; нерастяжимые нити; закрепленные точки; качение без скольжения.
Примеры идеальных связей:
1. Наложенная на материальную точку связь в виде гладкой поверхности (неподвижной или деформирующейся с течением времени), по которой должна двигаться точка (здесь возможные перемещения лежат в касательной плоскости к данной поверхности, а реакция связи этой плоскости ортогональна, так что скалярное произведение равно нулю).
2. Внутренние связи в абсолютно твёрдом теле, обеспечивающие постоянство расстояний между текущими положениями точек тела.
3. Контакт двух абсолютно твёрдых тел, соприкасающихся при движении гладкими поверхностями.
4. Контакт двух абсолютно твёрдых тел, соприкасающихся при движении абсолютно шероховатыми поверхностями.
Дата добавления: 2015-08-27 ; просмотров: 603 . Нарушение авторских прав
