
В данной статье приведены основные принципы и правила настройки коэффициентов ПИД-регулятора сточки зрения практического применения. Теоретические основы можно прочитать вот в этой статье .
Для простоты изложения рассмотрим настройку регулятора на примере. Допустим, необходимо поддерживать температуру в помещении с помощью обогревателя, управляемого регулятором. Для измерения текущей температуры используем термопару.
Задача настройки
Настройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
 На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.
 На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
А вот и приемлемые кривые:
 Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Далее поговорим о том, как подобрать коэффициенты для достижения оптимального регулирования. Рекомендуется настраивать коэффициенты в том же порядке, в котором это описано.
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
 При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).

При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю ( см. функцию преобразования ПИД-регулятора ). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.

Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Заключение
Настройка ПИД-регулятора довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
Настройка ПИД регуляторов по отклику (Метод №1).
1. Перевести регулятор в ручной режим, дождаться пока стабилизируется процесс и произвести однократное изменение выходного сигнала (выхода на клапан) X, которое обеспечит приемлемый отклик переменной технологического процесса Y (рисунок.1).
2. После получения отклика вернуться к исходному значению выходного параметра сигнала регулятора. Переменная технологического процесса также должна вернуться к исходному значению. Если различие значительно, повторите попытку отклика.
3. Определить коэффициент усиления процесса (Kp=Y/X), время запаздывания d, и временную константу Т усреднением значений верхнего и нижнего откликов.
4. Рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 1.
5. Для более устойчивой работы регулятора возможно необходимо будет увеличить временную константу замкнутого контура (E).
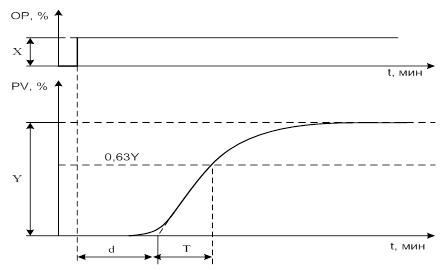
Рисунок 1. Отклик процесса на ступенчатое воздействие.
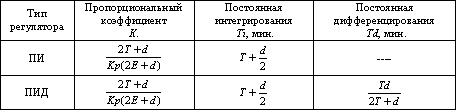
Таблица 1. Формулы вычисления коэффициентов для ПИД регуляторов
Где: Х – значение изменения выходного воздействия (в %);
Y – значение изменения переменной процесса (в % от шкалы);
Kp – коэффициент усиления процесса;
d – время запаздывания реакции процесса (в минутах);
Т – временная константа процесса (в минутах);
E – заданная временная константа замкнутого контура (минуты). Минимально возможное время в течении которого настраиваемый регулятор может привести значение переменной процесса к заданию.
Kp=Y/X
E=T+d
Для более устойчивой работы регулятора значение E нужно увеличить.
При настройке каскадных регуляторов, сначала настраивается ведомый регулятор, затем ведущий регулятор. Причем, временная константа E ведущего регулятора должна быть больше временной константы E ведомого регулятора минимум в 5 раз.
Настройка ПИД регулятора по методу максимального коэффициента усиления (Метод №2).
1. Переключите регулятор в ручной режим работы, когда процесс достаточно стабилен и на установке не ожидается резких отклонений от заданного режима. Установите Td (постоянную дифференцирования регулятора) и K (пропорциональный коэффициент регулятора) в значение равное нулю, а Ti (постоянную интегрирования регулятора) на максимальное значение.
2. Запомните исходное положение клапана на тот случай, если вам потребуется вернуться к нему в процессе настройки. Переключите регулятор в автоматический режим.
3. Постепенно увеличивайте значение пропорционального коэффициента до тех пор, пока не начнутся колебания. Нужно добиться, чтобы колебания были с постоянной амплитудой. Если колебания будут с возрастающей амплитудой, то пропорциональный коэффициент нужно уменьшить. При сильной раскачке необходимо перевести регулятор в ручной режим, выставить запомненное ране в пункте 2 значение выхода на клапан, уменьшить пропорциональный коэффициент и повторить попытку. Когда получатся равномерные колебания, замерьте период колебания tc (время отработки одного полного цикла)(см. рисунок 2). Получившийся пропорциональный коэффициент будет максимальным для данной системы регулирования (Kmax).
4. По полученным tc и Kmax, рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 2.
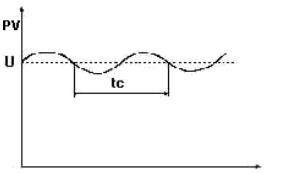
Рисунок 2. Определение периода колебаний
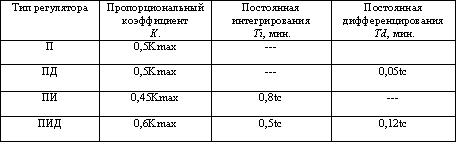
Таблица 2.Формулы вычисления коэффициентов для ПИД регуляторов
Общие правила для настройки регуляторов:
Регулятор не будет нормально работать, если клапан почти полностью закрыт или почти полностью открыт.
Настраивать регулятор нужно в той зоне шкалы, предположительно в которой ему предстоит работать.
Не следует использовать воздействие дифференциальной составляющей для регуляторов расхода.
Не следует использовать малые значения интегральной составляющей в регуляторах уровня.
Не следует использовать воздействие дифференциальной составляющей в регуляторах уровня.
После настройки регулятора, необходимо проверить его устойчивость, сменив значение задания на значительную величину. Если будет наблюдаться раскачка, то необходимо уменьшит коэффициент усиления.
Следует помнить о том, что безопасными для устойчивости регулятора, являются большие значения Ti и малые значения Td.
При зашумленных результатах измерений использование дифференциальной составляющей, как правило, невозможно. Ни в коем случае не устанавливайте дифференциальную составляющую, которая превышает интегральную.
При настройке каскадных регуляторов время интегрирования ведущего регулятора должно быть в 4 раза больше чем время интегрирования ведомого регулятора.
Примечание: После настройки регулятора по методу 1 или методу 2, для более точной работы регулятора можно подстроить его коэффициенты опираясь на рисунок 3.
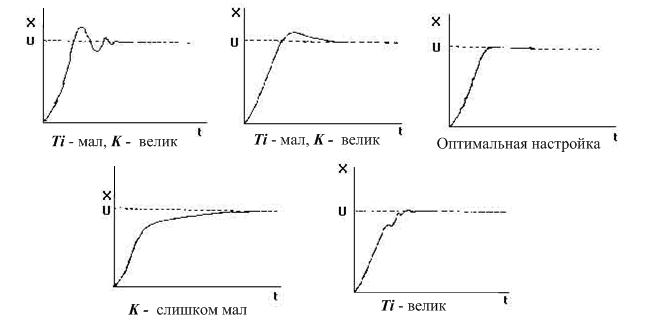
Рисунок 3. Графики для уточнения настройки регулятора.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться здесь.
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете здесь.
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования Перейти
