
С целью регулировки угловой скорости вращения ротора, а также крутящего момента на валу современных бесщеточных двигателей, применяют либо векторное, либо скалярное управление электроприводом.
Более всего распространение получило скалярное управление асинхронным двигателем, когда для управления например скоростью вращения вентилятора или насоса, достаточно удерживать постоянной скорость вращения ротора, для этого хватает сигнала обратной связи от датчика давления или от датчика скорости.
Принцип скалярного управления прост: амплитуда питающего напряжения является функцией частоты, причем отношение напряжения к частоте оказывается приблизительно постоянным.
Конкретный вид этой зависимости связан с нагрузкой на валу, однако принцип остается таковым: повышаем частоту, а напряжение при этом пропорционально повышается в зависимости от нагрузочной характеристики данного двигателя.
В итоге магнитный поток в зазоре между ротором и статором поддерживается почти постоянным. Если же отношение напряжения к частоте отклонить от номинального для данного двигателя, то двигатель либо перевозбудится, либо недовозбудится, что приведет к потерям в двигателе и к сбоям в рабочем процессе.

Таким образом скалярное управление позволяет добиться почти постоянного момента на валу в рабочем диапазоне частот независимо от частоты, однако на низких скоростях момент все же снижается (чтобы этого не произошло, необходимо повысить отношение напряжения к частоте), поэтому для каждого двигателя имеет место строго определенный рабочий диапазон скалярного управления.
Кроме того, невозможно построить систему скалярного регулирования скорости без датчика скорости, установленного на валу, ибо нагрузка сильно влияет на отставание реальной скорости вращения ротора от частоты питающего напряжения. Но даже с датчиком скорости при скалярном управлении не получится с высокой точностью регулировать момент (по крайней мере так, чтобы это было экономически целесообразно).
В этом и заключаются недостатки скалярного управления, объясняющие относительную немногочисленность сфер его применения, ограниченных в основном обычными асинхронными двигателями, где зависимость скольжения от нагрузки не является критичной.

Для избавления от названных недостатков, в далеком 1971 году инженеры компании Сименс предложили использовать векторное управление двигателем, при котором контроль осуществляется с обратной связью по величине магнитного потока. Первые системы векторного управления содержали датчики потока в двигателях.
Сегодня подход к данному методу несколько иной: математическая модель двигателя позволяет рассчитывать скорость вращения ротора и момент на валу в зависимости от текущих токов фаз (от частоты и величин токов в обмотках статора).
Этот более прогрессивный подход предоставляет возможность независимо и почти безынерционно регулировать как момент на валу, так и скорость вращения вала под нагрузкой, ибо в процессе управления учитываются еще и фазы токов.
Некоторые более точные системы векторного управления оснащены схемами обратной связи по скорости, при этом системы управления без датчиков скорости именуются бездатчиковыми.
Так, в зависимости от области применения того или иного электропривода, его система векторного управления будет иметь свои особенности, свою степень точности регулировки.
Когда требования к точности регулировки скорости допускают отклонение до 1,5%, а диапазон регулировки — не превышает 1 к 100, то бездатчиковая система вполне подойдет. Если же требуется точность регулировки скорости с отклонением не более 0,2%, а диапазон сводится до 1 к 10000, то необходимо наличие обратной связи по датчику скорости на валу. Наличие датчика скорости в системах векторного управления позволяет точно регулировать момент даже при низких частотах до 1 Гц.

Итак, векторное управление дает следующие преимущества. Высокую точность управления скоростью вращения ротора (и без датчика скорости на нем) даже в условиях динамически изменяющейся нагрузки на валу, при этом рывков не будет. Плавное и ровное вращение вала на малых скоростях. Высокий КПД в силу низких потерь в условиях оптимальных характеристик напряжения питания.
Не обходится векторное управление без недостатков. Сложность вычислительных операций. Необходимость задавать исходные данные (параметры регулируемого привода).
Для группового электропривода векторное управление принципиально не годится, здесь лучше подойдет скалярное.
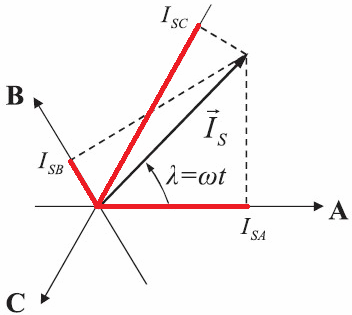
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами контролируется величина и угол пространственного вектора [1]. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
-
Преимущества векторного управления:
- высокая точность регулирования скорости;
- плавный старт и плавное вращение двигателя во всем диапазоне частот;
- быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
- увеличенный диапазон управления и точность регулирования;
- снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
-
К недостаткам векторного управления можно отнести:
- необходимость задания параметров электродвигателя;
- большие колебания скорости при постоянной нагрузке;
- большая вычислительная сложность.

Общая блок-диаграмма высокопроизводительной системы управления скорости бесщеточного двигателя переменного тока показана на рисунке выше. Основой схемы являются контуры контроля магнитного потокосцепления и момента вместе с блоком оценки, который может быть реализован различными способами. При этом внешний контур управления скоростью в значительной степени унифицирован и генерирует управляющие сигналы для регуляторов момента М * и магнитного потокосцепления Ψ * (через блок управления потоком). Скорость двигателя может быть измерена датчиком (скорости / положения) или получена посредством оценщика, позволяющего реализовать бездатчиковое управление.
Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
-
Чаще всего методы управления моментом разделяют на следующие группы:
- линейные (ПИ, ПИД) регуляторы;
- нелинейные (гистерезисные) регуляторы.
Если вам требуется, наши специалисты помогут вам выбрать оптимальный алгоритм управления для конкретной задачи или полностью сконфигурировать систему управления для электродвигателя на заказ (подробнее. ).
—>
| Метод управления | Диапазон регулирования скорости | Погрешность скорости 3 , % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Скалярный | 1:10 1 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | |||||||
| Векторный | Линейный | Полеориентированное управление | >1:200 2 | 1:200 2 | Нелинейный | Прямое управление моментом с таблицей включения | >1:200 2 | 1:200 2 | 1 | ||||
- Схема приведена в упрощенном виде.
Подробная схема бездатчикового полеориентированного управления СДПМ с ротором с явно выраженными полюсами.
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора Is используется для контроля и потокосцепления и момента. Таким образом, ток возбуждения и ток якоря объединены в вектор тока статора и не могут контролироваться раздельно. Разъединение может быть достигнуто математически — разложением мгновенного значения вектора тока статора Is на две компоненты: продольную составляющую тока статора Isd (создающую поле) и поперечную составляющую тока статора Isq (создающую момент) во вращающейся dq системе координат ориентированной по полю ротора (R-FOC – rotor flux-oriented control) — рисунок выше. Таким образом, управление бесщеточным двигателем переменного тока становится идентичным управлению КДПТ с независимым возбуждением и может быть осуществлено используя инвертер ШИМ с линейным ПИ регулятором и пространственно-векторной модуляцией напряжения.
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения Vsα * и Vsβ * .

Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.
Прямое управление моментом с пространственно векторной модуляцией напряжения
Блок-схема прямого управления моментом с пространственно векторной модуляцией с регулировкой момента и потокосцепления с обратной связью работающей в прямоугольной системе координат ориентированной по полю статора представлена на рисунке ниже. Выходы ПИ регуляторов момента и потокосцепления интерпретируются как опорные составляющие напряжения статора Vψ * и VM * в системе координат dq ориентированной по полю статора (англ. stator flux-oriented control, S-FOC). Эти команды (постоянные напряжения) затем преобразуются в неподвижную систему координат αβ, после чего управляющие значения Vsα * и Vsβ * поступают на модуль пространственно векторной модуляции.

Обратите внимание, что данная схема может рассматриваться как упрощенное управление ориентированное по полю статора (S-FOC) без контура управления током или как классическая схема прямого управления моментом с таблицей включения (ПУМ-ТВ, англ. switching table DTC, ST DTC) в которой таблица включения заменена модулятором (ПВМ), а гистерезисный регулятор момента и потока заменены линейными ПИ регуляторами.
В схеме прямого управления моментом с пространственно векторной модуляцией (ПУМ-ПВМ) момент и потокосцепление напрямую управляются в замкнутом контуре, поэтому необходима точная оценка потока и момента двигателя. В отличии от классического алгоритма гистерезисного прямого управления моментом, ПУМ-ПВМ работает на постоянной частоте переключения. Это значительно повышает характеристики системы управления: уменьшает пульсации момента и потока, позволяет уверенно запускать двигатель и работать на низких оборотах. Но при этом снижаются динамические характеристики привода.
Нелинейные регуляторы момента
Представленная группа регуляторов момента отходит от идеи преобразования координат и управления по аналогии с коллекторным двигателем постоянного тока, являющегося основой для полеориентированного управления. Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора.
В сравнении с полеориентированным управлением схемы прямого управления моментом имеют следующие характеристики:
-
Преимущества:
- простая схема управления;
- отсутствуют контуры тока и прямое регулирование тока;
- не требуется преобразование координат;
- отсутствует отдельная модуляция напряжения;
- датчик положения не требуется ;
- хорошая динамика.
-
Недостатки:
- требуется точная оценка вектора магнитного потокосцепления статора и момента;
- сильные пульсации момента и тока из-за нелинейного (гистерезисного) регулятора и переменной частоты переключения ключей;
- шум с широким спектром из-за переменной частоты переключения.
-
К группе нелинейных регуляторов момента относят:
- прямое управление моментом с таблицей включения (ПУМ);
- прямое самоуправление (ПСУ);
- адаптивное прямое управление моментом;
- нейронные сети;
- регуляторы с нечеткой логикой.
Прямое управление моментом
Впервые метод прямого управления моментом с таблицей включения был описан Такахаси и Ногучи в статье IEEJ представленной в сентябре 1984 года и позже в статье IEEE опубликованной в сентябре 1986 года [5]. Схема классического метода прямого управления моментом (ПУМ) на много проще, чем у метода управления по полю (ПОУ), так как не требуется преобразования систем координат и измерения положения ротора. Схема метода прямого управления моментом (рисунок ниже) содержит оценщик момента и потокосцепления статора, гистерезисные компараторы момента и потокосцепления, таблицу включения и инвертор.
Принцип метода прямого управления моментом заключается в выборе вектора напряжения для одновременного управления и моментом и потокосцеплением статора. Измеренные токи статора и напряжение инвертора используются для оценки потокосцепления и момента. Оцененные значения потокосцепления статора  и момента
и момента  сравниваются с управляющими сигналами потокосцепления статора ψs * и момента двигателя M * соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора
сравниваются с управляющими сигналами потокосцепления статора ψs * и момента двигателя M * соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора  полученного исходя из его углового положения
полученного исходя из его углового положения  . Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.
. Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.

-
Характерные черты схемы ПУМ-ТВ:
- синусоидальные формы потокосцепления и токов статора с коэффициентом гармоник определяемым зоной гистерезиса (зоной нечувствительности) регуляторов потокосцепления и момента;
- отличная динамика момента;
- зоны гистерезиса потокосцепления и момента определяют частоту переключения инвертора, которая изменяется с изменением синхронной скорости и изменением нагрузки [2].
Имеется множество вариаций классической схемы ПУМ-ТВ нацеленых на улучшение пуска, условий перегрузки, работы на очень низких скоростях, уменьшение пульсаций момента, работу на переменной частоте переключения и уменьшение уровня шумов.
Недостатком классического метода прямого управления моментом является наличие высоких пульсаций тока и момента в установившемся состоянии. Проблема устраняется повышением рабочей частоты инвертора выше 40кГц, что увеличивает общую стоимость системы управления [1].
Прямое сомоуправление
Заявка на патент метода прямого самоуправления была подана Депенброком в октябре 1984 года [6]. Блок схема прямого самоуправления показана ниже.
Основываясь на командах потокосцепления статора ψs * и текущих фазовых составляющих ψsA, ψsB и ψsC компараторы потокосцепления генерируют цифровые сигналы dA, dB и dC, которые соответствуют активным состояниям напряжений (V1 – V6). Гистерезисный регулятор момента имеет на выходе сигнал dM, который определяет нулевые состояния. Таким образом, регулятор потокосцепления статора задает отрезок времени активных состояний напряжений, которые перемещают вектор потокосцепления статора по заданной траектории, а регулятор момента определяет отрезок времени нулевых состояний напряжений, которые поддерживают момент электродвигателя в определенном гистерезисом поле допуска.

-
Характерными особенностями схемы прямого самоуправления являются:
- несинусоидальные формы потокосцепления и тока статора;
- вектор потокосцепления статора перемещается по шестиугольной траектории;
- нет запаса по напряжению питания, возможности инвертора используются полностью;
- частота переключения инвертора ниже чем у прямого управления моментом с таблицей включения;
- отличная динамика в диапазонах постоянного и ослабленного поля.
Заметьте, что работа метода прямого самоуправления может быть воспроизведена с помощью схемы ПУМ-ТВ при ширине гистерезиса потока 14%.
По способу управления электродвигателем частотные преобразователи можно разделить на две группы: с векторным и скалярным управлением, и каждая модель имеет свои преимущества и недостатки.
Скалярный тип управления. При скалярном (частотном) управлении формируются гармонические токи фаз двигателя это означает что управление чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя. При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярный способ управления позволяет осуществлять легкую регулировку, даже при использовании заводских настроек.
Векторный тип управления. Векторное управление — метод управления синхронными и асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз, но и обеспечивающим управление магнитным потоком ротора (моментом на валу двигателя). Векторное управление применяется в случае, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходимо получить расширенный диапазон регулирования частоты при номинальных моментах, например, 0…50 Гц для момента 100% или даже кратковременно 150-200% от Мном, это позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле.
При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление». Векторный способ управления преобразователем частоты позволяет осуществлять гораздо более качественное управление электродвигателем, нежели скалярный. Зато настройка такого преобразователя требует глубоких познаний в области устройства электропривода и электрических машин.
Метод векторного управления с обратной связью по скорости – используется для прецизионного регулирования (необходимо использовать инкрементальный энкодер) скорости, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходим максимальный диапазон регулирования частоты при моментах близких к номинальному.
Векторный метод работает нормально, если введены правильно паспортные величины двигателя и успешно прошло его автотестирование. Векторный метод реализуется путем сложных расчетов в реальном времени, производимых процессором преобразователя на основе информации о выходном токе, частоте и напряжении. Процессором используется так же информация о паспортных характеристиках двигателя, которые вводит пользователь. Время реакции преобразователя на изменение выходного тока (момента нагрузки) составляет 50…200 мсек. Векторный метод позволяет минимизировать реактивный ток двигателя при уменьшении нагрузки путем адекватного снижения напряжения на двигателе. Если нагрузка на валу двигателя увеличивается, то преобразователь адекватно увеличивает напряжение на двигателе. Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна. Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
